|
To borrow a title from a former chancellor of our alma mater; in this post we'll provide a paraphrased history of the project from inception to the present day. Intro and early days Getting straight into it - the idea for the project came from a conversation between Tom M & Tom A at a friends' wedding in 2014 - thanks Andy and Michelle!
 The first 'bat drone' During the project we've been very fortunate to be invited to the Natural History Museum to give a talk and have a stand at a couple of events. One of the questions that comes up most often is "what company or university are you at?" We're not. The project is simply a very enjoyable hobby. We want to help further bat conservation it's a great way that we can assist with this using our respective skills. Tom A is our bat expert (and is now a qualified and competent drone pilot) and Tom M is our drone designer, builder and operator. We think this goes to show that if people are willing, you don't need the support of a big research grant or institution to push boundaries. Our advice is to "give it a go and see where it takes you".
We knew that quadcopters produced a lot of sound but didn't know how much of this was ultrasound. Our first tests showed us that it was a considerable amount. This ultrasonic interference has been a running theme through the project. The problem lies in the signal to noise ratio of the bat call. If there is too much noise from the drone we won't be able to 'hear' the bat call. This meant that we had to separate the drone and the detector recording the bat calls by about five meters. The highly technical application of a piece of string was employed though this wasn't without it's problems as you can see in the video below. The problem of the oscillation arose due to the high weight of the detector. We were glad we used a water bottle of the same weight as the detector in testing! The detector and recorder weighed about a third of the quadcopter mass. This led to loss of control and meant and it wasn't an option in this configuration.
In going back to the drawing board we wanted something that produced less noise and could comfortably fly with the payload of the detector. The obvious choice for us was to move to a plane; it had the added bonus of being able to fly for longer too (about 8 mins for the quad and 25 for the plane).
0 Comments
Last time we picked up the Batboat we put in an autopilot and managed an autonomous run (check out the last blog post here for more info). We now wanted to move on to fine tuning the autopilot and some real world field testing. Tom A had recently performed a survey along a transect route that included a decent stretch of the River Thames in Oxfordshire. A number of species (Daubenton's Pipistrelles and Noctules) were picked up during the survey so we knew that this was a good stretch of river to test the Batboat on. What are we looking to test?
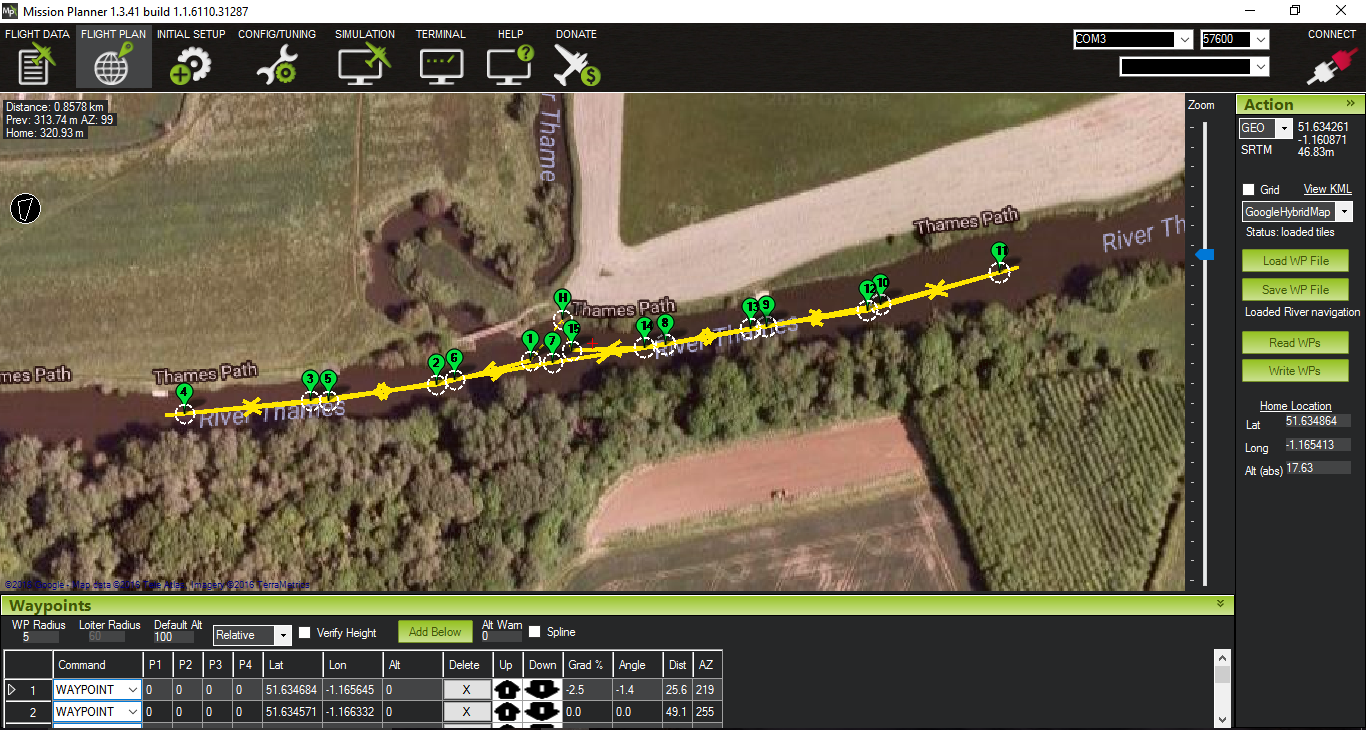
To this end we headed down to the river during the day to assess the autonomous navigation of the boat along the river. 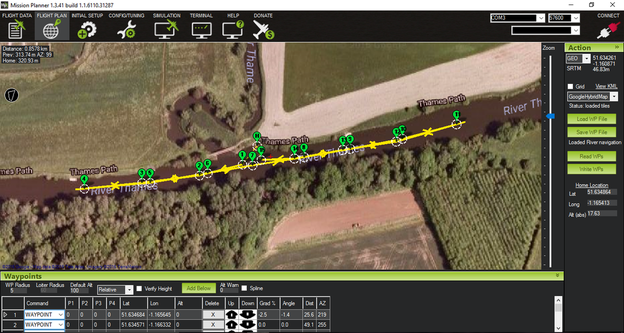 Set up of the testing route on Mission Planner We set a waypoint route for the boat that headed up river, turned around, then came back down river past the starting point and then another turn and back to us. All was well on the up river stretch and we were able to walk along and see the boat from the river bank. At the turning point, the boat struggled to make a small enough turning circle and ran into the near bank. Fortunately, we did plan for this and had brought some swimming things so we could fetch the boat if necessary. A short cold plunge later and we were able to run another test.  Impromptu light hood for setting up routes on the laptop We're not experts on the navigational algorithms that the code contains (on the autopilot) and although we went through a number of variations with settings we only managed to make a couple of successful runs up and down the river. We think that a directional propulsion system would have more luck in steering the boat successfully; this is something we'll investigate in the future. Despite this, we knew that the boat could at least navigate either an up river section or down river section successfully so we decided to head back out during the evening for a field test. Lights were fitted (red for port, green for starboard) and we had no issues seeing the boat in the dark. First hurdle overcome.  Navigation lights We'd set up a long run (circa 400m) up the river and then back to us so we could follow the boat from the river bank. We really hoped that the boat would make the turn on this one as it was now dark and neither of us fancied another trip into the water to fish out the boat! With bat detectors in hand beeping away, we knew that we had a good chance of success so launched the boat and flipped the switch for the autonomous navigation to take over. Leaving all of our other equipment by the river bank we excitedly walked a parallel path to the boat and kept our fingers crossed that all was going to be well. A few minutes later and we'd reached the turning point (fingers now extra crossed). The boat started to make the turn away from us and toward the far bank. All was going well until we realised that there were some low trees with branches in the water which were lit up by the lights and the boat was now powering into them. We flipped the autopilot off and back to manual control but it was no good, we'd managed to get the boat stuck on the far side of the river. Somewhat dismayed at what we knew was coming up we trudged the 400m back to our equipment and picked up the wetsuit. The bank was fairly steep opposite the boat so it took a little hanging onto trees and squelching through river mud to reach some quite chilly open water. With the head torch on low to avoid too many insects being attracted I swam over and pulled the boat from the branches. Boat successfully recovered? Check. Swam in the Thames at night? Check. The question that seems to come to mind is: was it worth it? To answer that, have a look at the selection of recordings from the evening run below. In relation to our aims for this experiment:
The autonomous navigation of the Batboat - is it able to successfully navigate a loop on the river? Not reliably. We've seen that it is possible though requires refinement of the navigational algorithms that control the turn or a different physical set up of the boat. Peersonic have kindly provided us with a new microphone which has a filter on that suppresses frequencies below about 20 kHz. We're hoping that this means we have a better signal to noise ratio given that the motor/prop puts out noise at (generally) below 20 kHz. Yes. It appears that the new microphone is suppressing the noise from the motor and as a result there is an improved signal to noise ratio for the bat calls. Successful use of the Batboat at night - are the lights ok? Can we see the boat?Yes. No problem seeing the boat from the bank or at approximately 100m away. Recordings of bats - can we get any, are they useful (ie good signal to noise etc)? Yes. Very happy with the signal to noise ratio of the calls, there's is noise showing in the spectrograms and importantly it doesn't interfere with the calls which are very clear. Worth noting as well that we didn't see any change in the bats flights when the boat was near them. They appear to ignore it. In conclusion, we're happy with the results from this set of testing. From a search we can't find any instance of anyone attempting to record bats from an autonomous boat so we're claiming a world first on this one. We'll be working on this system to improve reliability and then move onto further field testing. Keep your eyes on the blog for more updates! If you managed to read our first post about the Batboat (here) then you'll know that we had a couple of issues with its performance. This was mainly that at low speeds, the maneuverability was poor. The idea we had to fix this is to add a much larger rudder to the boat to increase the surface area and provide a larger moment on the boat allowing it to turn faster. Here's what we came up with:  New rudder side view  New rudder end view The new rudder has approximately four times the surface area of the old rudder and has managed to cut our turning radius at low speeds in half. It's made out of brass which is very corrosion resistant. We picked up the brass from a hardware shop and it wasn't too difficult to find and to work with. To attach the plate to the rudder we drilled a couple of holes in the rudder and the plate and put two bolts through which are secured with nuts. One consideration with the larger rudder is that we now don't want to travel as fast and make a large turn as this will put a lot more force on the rudder control servo and we don't want to strip the gears (within the servo). As part of this we've limited the throttle input to 50%. Another new addition to the Batboat is a Pixhawk flight controller with the rover firmware installed for ground based vehicles. Have a look here for the rover documentation. We've found a little space on the underside of the lid to put it on:  Pixhawk 'flight controller' 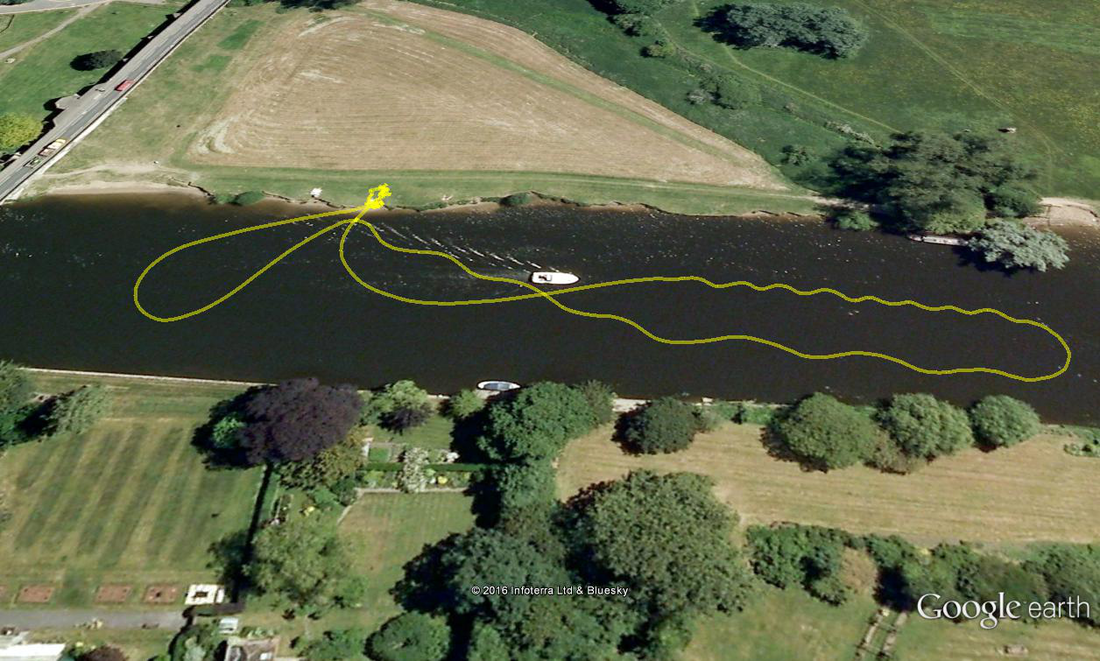 Batboat first autonomous run Just like the plane and quadcopter, the Pixhawk allows us to program in pre-set waypoints for the boat and for it to navigate to these waypoints autonomously. We managed a little test of this system up and down the river in a loop of about 150m which the boat navigated well though the PID settings require tuning (check out the weaving that we currently have on the image above). Unfortunately we don't have a video of the boat following the waypoints but we did have some fun after and do some drive-bys and soak ourselves so here's a video of that instead! Next step for the Batboat will be tuning the controller and some real world testing to record some bats! Stay tuned to see how we get on! In our efforts to replicate all of Batman's modes of transport in miniature we thought the Batboat would be a fairly easy hit... This was an idea which originally came about from discussing the possibility of monitoring bats over water using the BatUAV. We then thought, why not just use a boat? This idea was put aside as we were concentrating on the planes but later on Peter at Peersonic also had the idea independently and put it to us. The result is this fine vessel:  Canados 90 Oh wait, no, that's not the one... This looks more like it, the little one called Princess:  Princess So we've ended up with a boat from hobbyking called Princess. She's about 1m long and 30cm wide and can travel incredibly quickly (at about 35mph, which we don't need but it's always fun). There's quite a few challenges to overcome in using a boat autonomously:
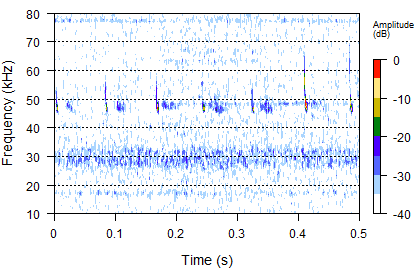
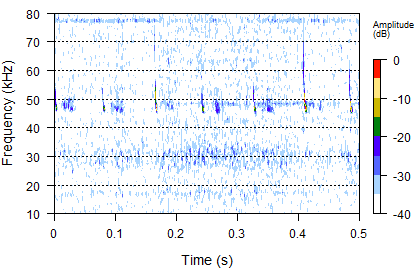
We've plugged in a Pixhawk flight controller which can run Ardurover which controls ground vehicles such as a boat. The Batboat works just fine using this. Have a look at our video below for the initial runs. As for the ultrasonic interference we've tried out a new microphone from Peter which discriminates against 8kHz and below (to try and cut out some interference). Below are some sonograms of the results at the bow and the stern. Bow 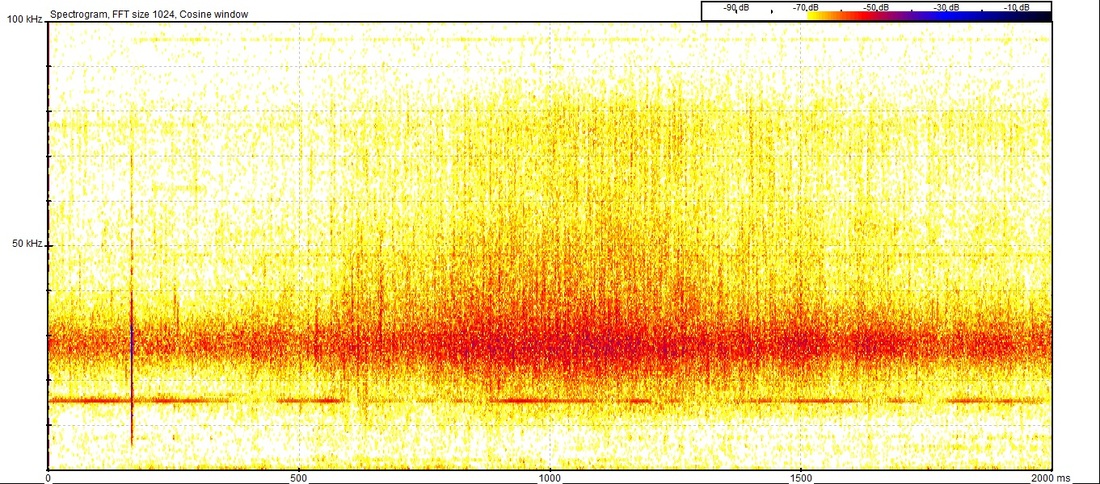 Stern 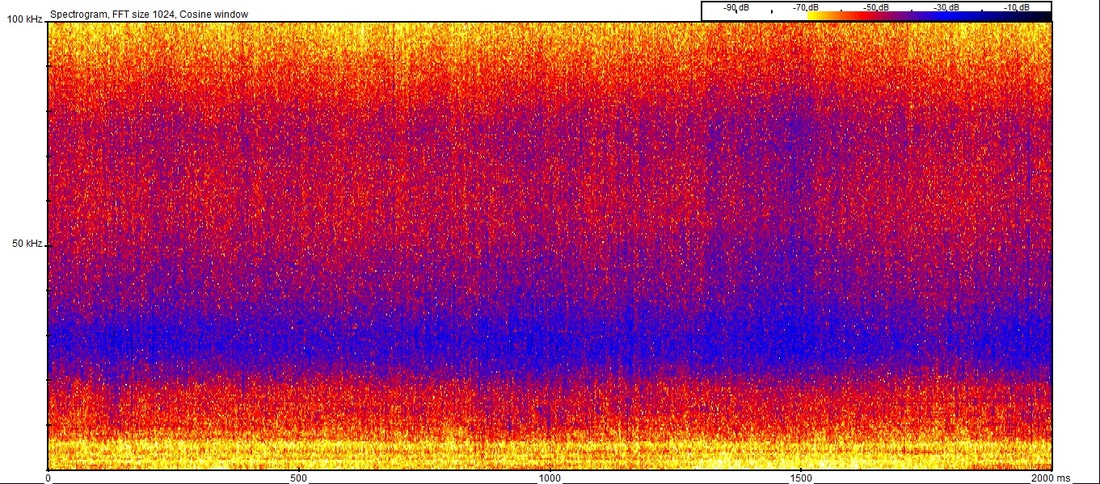
Obviously, the interference at the stern makes the microphone here essentially unusable. The bow is much better but we'll need to protect the microphone from any splashes. Hopefully we'll be able to turn off the motor and ensure there's practically zero interference whilst collecting data. Exactly how this is going to work in moving water is uncertain at the moment as we'll need to test position hold. We didn't manage to fit in any GPS testing (ie autonomous piloting) but watch this space for more testing soon! |
Categories
All
Archives
March 2017
|


 RSS Feed
RSS Feed
