When we tested the quadcopter we found it produced a lot of ultrasound interference. This time we tested our new plane (Bix-3, Hobby King) to see how it compared. We had three different propellers to test, and we also tried out some acoustic foam to try and dampened the noise from the engine. In the graph you can see each of the propellors types across the top and the results with and without foam along the side. The three lines in each panel show three distances from the nose of the plane, 0cm, 50cm, and 100cm, the top line being the closest (0cm). 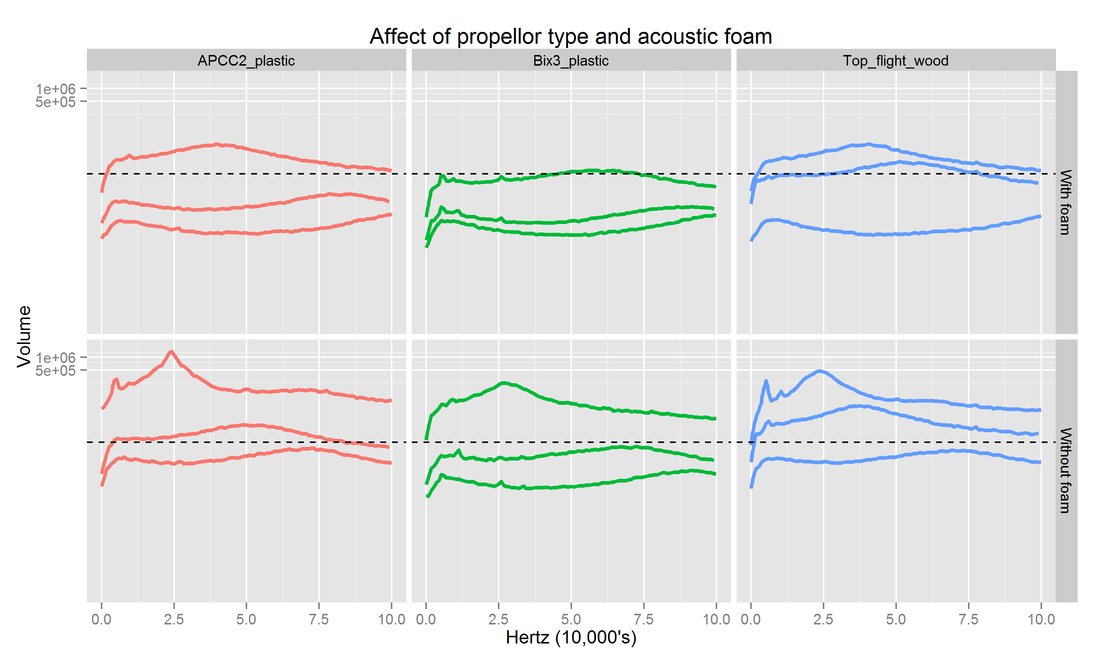 You can clearly see that across the three propeller types the foam makes a big difference to the volume of interference (note that y-axis has a log scale). All the top panels (with foam) have a lower amount of interference than the paired bottom panels (without foam). When we compare across the propeller types the Bix3 clearly outperforms the others, and the volume levels at 50cm with foam is similar to that at 300cm with the quadcopter, a great improvement.
0 Comments
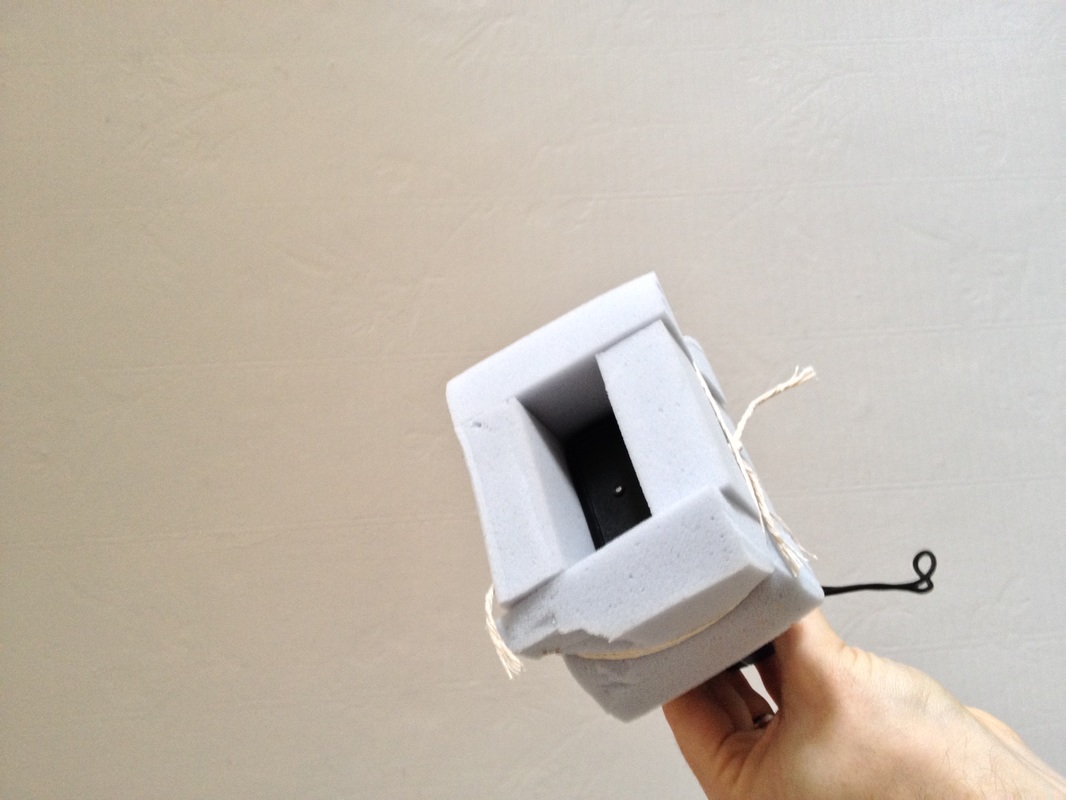
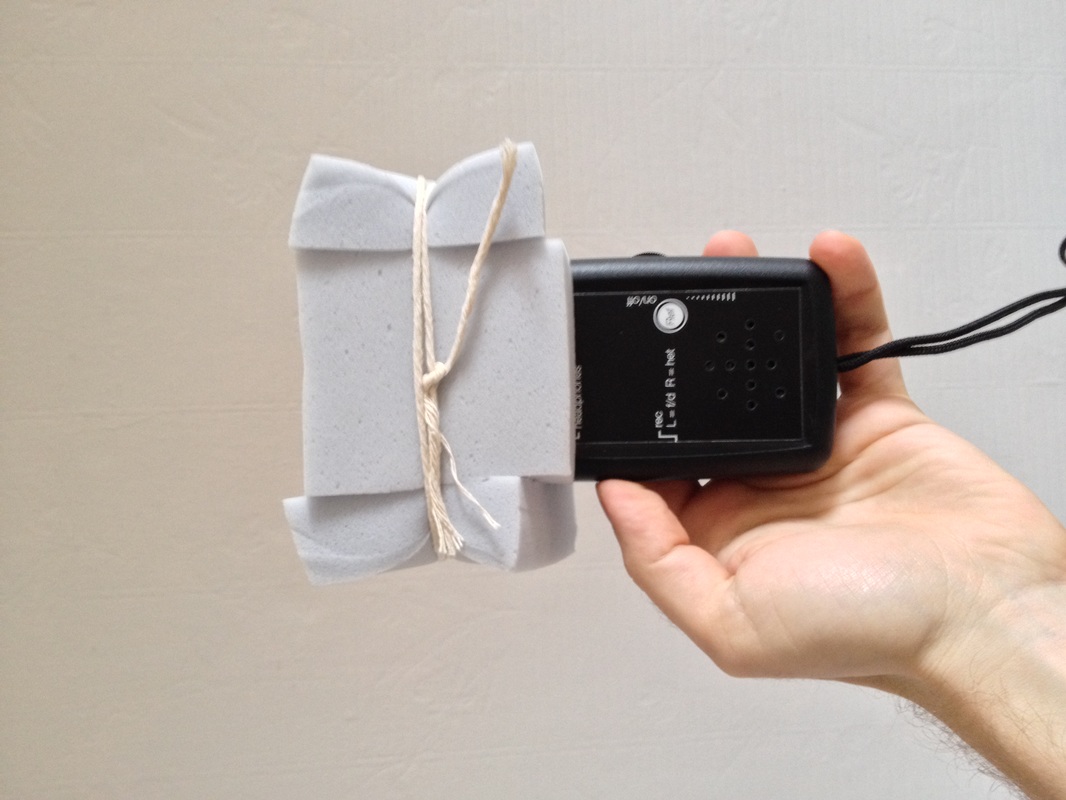
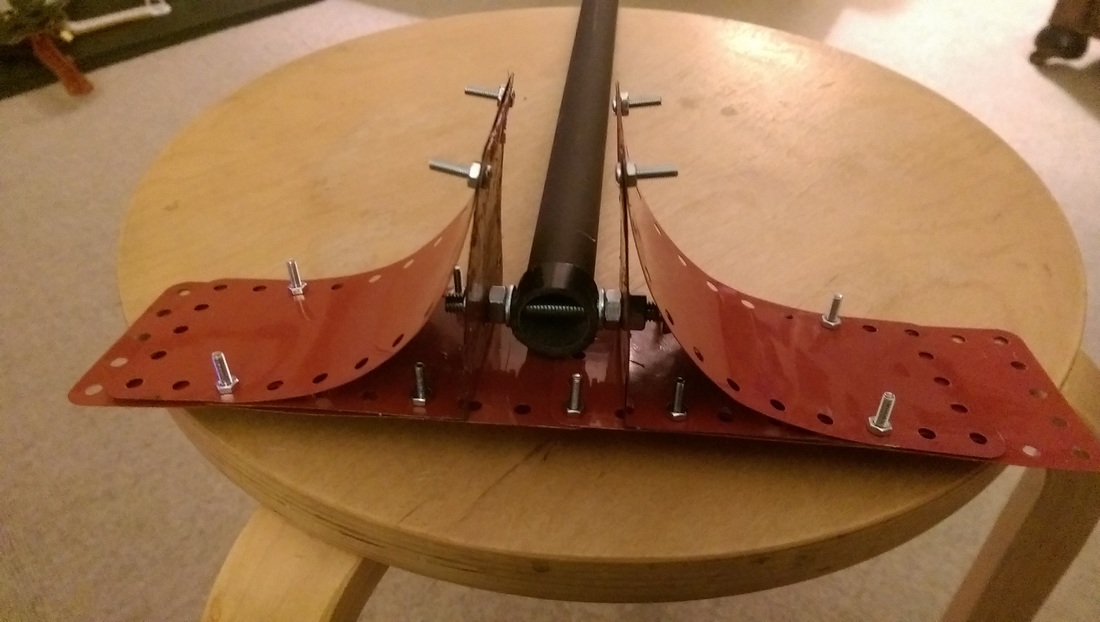
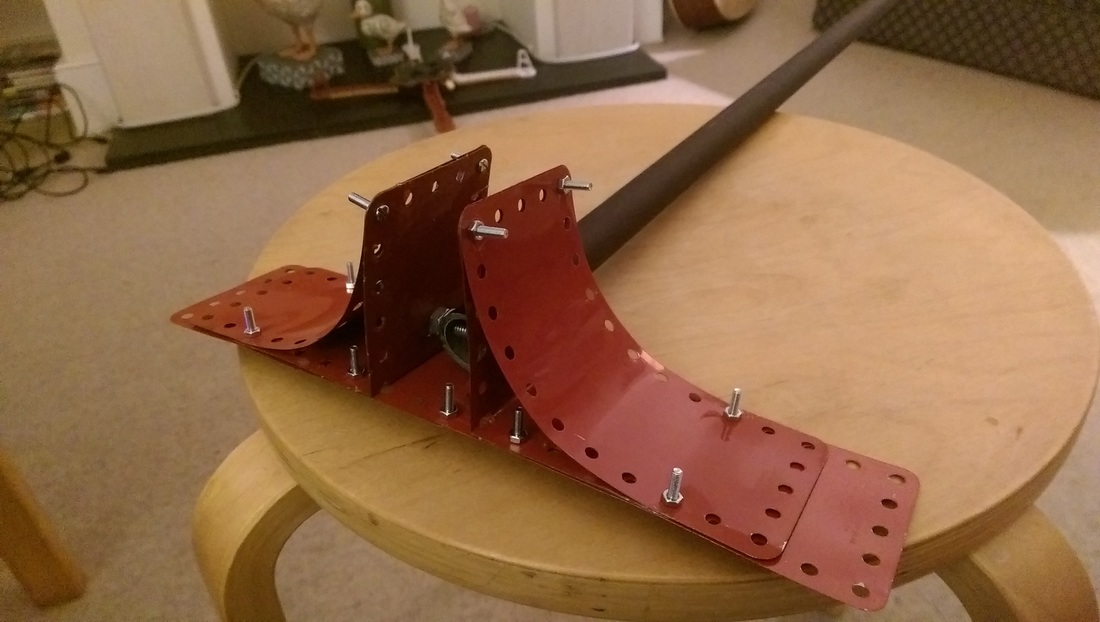
What do we know so far: Hanging a bat detector from a single pivot point with string doesn't work, have a look at the blog post here for what happens. Next up the bat detector was attached to each of the four quadcopter arms using string at a distance of 3m. There's no video of this unfortunately but it didn't work. There was still huge oscillation with the load which would have lead to a crash if it had continued. The second option that was tried was a solid rod which could pivot with the pitch of the quadcopter. The idea here was to try and fly the quadcopter with pitch and yaw only. Here's a few photos of the design:
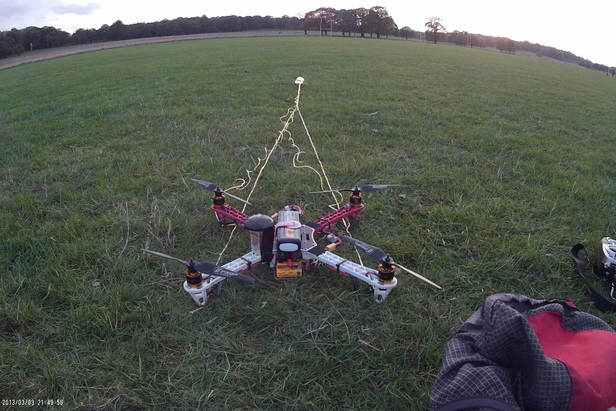
The pivot is made from meccano and a few bolts from B&Q. The rod was meant for fishing and I think it's a glass/carbon fibre composite. Here's what happened when it was flown: So this didn't work either. It's not particularly clear from the video but the fact that there's almost no roll component to the flight makes the quad very difficult to control. Once a load was added to the extention of the rod it would be practically unflyable. As a short aside it may be possible to fly using the autonomous flight controller and limiting inputs to pitch and yaw but by human control it's too difficult not to use roll which is muscle memory by now. What's next? By using a dampener on the rod and allowing pivoting in two axes we believe that this would allow freer flight. Watch this space. UPDATE: at the present moment (October 2015) we've moved onto working with a plane and have achieved mild success using this vehicle. It's worth adding that the work performed here on the quadcopter is no longer necessary as our detector is now much less that 300g. I do believe that a quadcopter would be a very good vehicle to use for conducting these surveys though the cost is prohibitive to us as to achieve a flight time of even 30 minutes is beyond our budget. We also worked on the dampener in the form of a rubber golf tee (the sort you find at driving ranges). This proved to be very effective. If we hadn't investigated the plane, we may well be using this method now. I'd like to write a little on how we're going to capture the ultrasound that the bats are chatting and hunting with. In the last post we thought that we'd be using a Dodotronic ultramic 200k but as it's somewhat expensive (about £200) we thought it would be worth investigating other options. We're really getting into the nitty gritty of the project here so if you're not fussed by the technical aspects then we'll be putting up a Part 2 which will update everyone with which option we've chosen. Let's start with what we know so far. We'll be flying around with this thing so our system needs to be as light and small as possible as it might end up a bit of distance from the aircraft (due to the ultrasonic interference from the motor and propeller). There's a few different ways to do this let's take a look at them: Direct recording to digital recorder from an ultrasonic mic - for this option we need to fulfil a few requirements. The recorder must be able to sample at circa 200kHz as the highest frequency we'll be looking to capture will be around 100kHz and the sampling rate must be at least double the frequency you're looking to record. We would also need a microphone that is sensitive to ultrasound at these high frequencies. In theory this is an excellent option as it can be very small and light. The problem is that we haven't been able to find a small digital recorder that can record at ~200kHz. Aside from this, the ones that can are expensive (£thousands) which definitely takes this option out of our price range. Recording the output of a bat detector - we can use any type of bat detector for this (have a google for heterodyne, frequency division or time expansion detectors if you'd like to know more). The detector can be tied up with a digital recorder using a standard sampling rate (~96kHz) as the output of the bat detector is in the human audible range. The bat detector we were thinking of is the Batbox Baton (http://www.batbox.com/baton.asp).  Batbox Baton bat detector The cost of the Baton is around £85 and we already have a digital recorder so this does provide a good option. The only concern is the size and weight which, whilst smaller and lighter than other bat detectors is still considerable. Whether we use this option will depend on whether we see a large amount of interference close to the plane or whether we can work out a method for the quadcopter. Digital microphone paired with phone/raspberry pi - The final option was discussed briefly in the last post which is the Dodotronic Ultramic 200k. This does the sampling for you at 200kHz and can be recorded directly to a .wav file on a phone.  Dodotronic Ultramic 200k with phone This provides probably the lightest and smallest option but at a cost of around £200 for the microphone.
We'll make the decision for which option we're going after doing some interference testing with the plane in order to find out where we can place the microphone. If it's on the plane or underneath then we'll be able to go with the cheaper Batbox baton option if it needs to be a good distance away from the plane then it'll likely be the ultramic option. As a quick aside you might be wondering why the interference drops off so quickly with distance from the motors and propellers. As the frequency of sound increases so does the attenuation of that sound. This means that the attenuation of ultrasound in air is high so by 3m away from the quadcopter there is virtually no interference (see the earlier post when we measured this). Fortunately, some bats are very noisy with their ultrasound calls so despite the high attenuation we should be able to detect them from up to 30m away. So the distance at which we'll be able to detect species depends on the intensity of their call and the frequency at which they emit the call. The major factor here is the intensity of the call as due to specialisations they can be very different. For example, noctules are super loud as they fly in open areas and they need to see long distances. Can't wait to get testing and out into the field. Stay tuned for updates! |
Categories
All
Archives
March 2017
|




 RSS Feed
RSS Feed
