|
The big event of the bat calendar is the Bat Conservation Trust's annual conference. We had always made it an ambition of ours to attend so we were excited to be accepted to talk this year. We gave an overview of our project, from our initial idea, through up and downs, to our first recordings from the Bat-Plane and Bat-Boat.  Our talk went down well and can be viewed online, over here. We also heard some other great talks including some innovative uses of technology. The future looks bright for bat work in the UK.  We got to show off our drones, old and new. some with a lot more duct tape on than others! We also had some great questions from the audience and great discussions with other attendees which we hope to build on in the next field season.
0 Comments
Last time we picked up the Batboat we put in an autopilot and managed an autonomous run (check out the last blog post here for more info). We now wanted to move on to fine tuning the autopilot and some real world field testing. Tom A had recently performed a survey along a transect route that included a decent stretch of the River Thames in Oxfordshire. A number of species (Daubenton's Pipistrelles and Noctules) were picked up during the survey so we knew that this was a good stretch of river to test the Batboat on. What are we looking to test?
To this end we headed down to the river during the day to assess the autonomous navigation of the boat along the river. 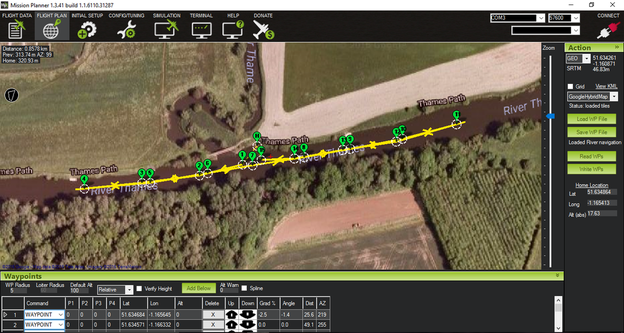 Set up of the testing route on Mission Planner We set a waypoint route for the boat that headed up river, turned around, then came back down river past the starting point and then another turn and back to us. All was well on the up river stretch and we were able to walk along and see the boat from the river bank. At the turning point, the boat struggled to make a small enough turning circle and ran into the near bank. Fortunately, we did plan for this and had brought some swimming things so we could fetch the boat if necessary. A short cold plunge later and we were able to run another test.  Impromptu light hood for setting up routes on the laptop We're not experts on the navigational algorithms that the code contains (on the autopilot) and although we went through a number of variations with settings we only managed to make a couple of successful runs up and down the river. We think that a directional propulsion system would have more luck in steering the boat successfully; this is something we'll investigate in the future. Despite this, we knew that the boat could at least navigate either an up river section or down river section successfully so we decided to head back out during the evening for a field test. Lights were fitted (red for port, green for starboard) and we had no issues seeing the boat in the dark. First hurdle overcome.  Navigation lights We'd set up a long run (circa 400m) up the river and then back to us so we could follow the boat from the river bank. We really hoped that the boat would make the turn on this one as it was now dark and neither of us fancied another trip into the water to fish out the boat! With bat detectors in hand beeping away, we knew that we had a good chance of success so launched the boat and flipped the switch for the autonomous navigation to take over. Leaving all of our other equipment by the river bank we excitedly walked a parallel path to the boat and kept our fingers crossed that all was going to be well. A few minutes later and we'd reached the turning point (fingers now extra crossed). The boat started to make the turn away from us and toward the far bank. All was going well until we realised that there were some low trees with branches in the water which were lit up by the lights and the boat was now powering into them. We flipped the autopilot off and back to manual control but it was no good, we'd managed to get the boat stuck on the far side of the river. Somewhat dismayed at what we knew was coming up we trudged the 400m back to our equipment and picked up the wetsuit. The bank was fairly steep opposite the boat so it took a little hanging onto trees and squelching through river mud to reach some quite chilly open water. With the head torch on low to avoid too many insects being attracted I swam over and pulled the boat from the branches. Boat successfully recovered? Check. Swam in the Thames at night? Check. The question that seems to come to mind is: was it worth it? To answer that, have a look at the selection of recordings from the evening run below. In relation to our aims for this experiment:
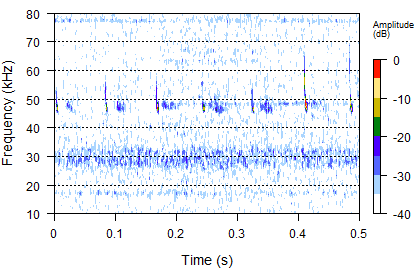
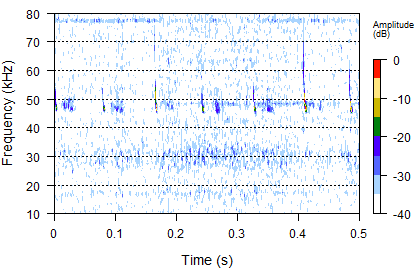
The autonomous navigation of the Batboat - is it able to successfully navigate a loop on the river? Not reliably. We've seen that it is possible though requires refinement of the navigational algorithms that control the turn or a different physical set up of the boat. Peersonic have kindly provided us with a new microphone which has a filter on that suppresses frequencies below about 20 kHz. We're hoping that this means we have a better signal to noise ratio given that the motor/prop puts out noise at (generally) below 20 kHz. Yes. It appears that the new microphone is suppressing the noise from the motor and as a result there is an improved signal to noise ratio for the bat calls. Successful use of the Batboat at night - are the lights ok? Can we see the boat?Yes. No problem seeing the boat from the bank or at approximately 100m away. Recordings of bats - can we get any, are they useful (ie good signal to noise etc)? Yes. Very happy with the signal to noise ratio of the calls, there's is noise showing in the spectrograms and importantly it doesn't interfere with the calls which are very clear. Worth noting as well that we didn't see any change in the bats flights when the boat was near them. They appear to ignore it. In conclusion, we're happy with the results from this set of testing. From a search we can't find any instance of anyone attempting to record bats from an autonomous boat so we're claiming a world first on this one. We'll be working on this system to improve reliability and then move onto further field testing. Keep your eyes on the blog for more updates! |
Categories
All
Archives
March 2017
|
 RSS Feed
RSS Feed
