|
We have made a lot of advances on the detector side of things so decided to re-visit the use of the quad-copter, something we had moved away from due to issues with motor noise and the weight of the detector. We suspended the Peersonic detector under the quad and flew a small route of approximately 200 meters along tree-lines surrounding a field. In the corner of the field we picked up bats. This is the first time we have picked up high quality recordings of bats using our setup!  The flight path of the quad-copter 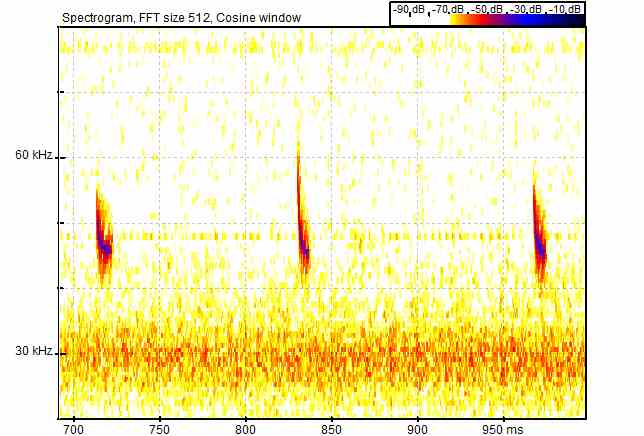 Sonogram of our first recordings Video of the flight with audio from a Bat Box Duet (held at ground level along with the camera) This is a real break though as the noise we see from the propellers is clearly significantly quieter that the calls we recorded. To reduce this further we hung the detector a little lower (initially 2m and changed to 4m) from the quad and got some even better calls from Common Pipistrelles (Pipistrellus pipistrellus). We know these are common pipistrelles because of their 'hockey stick' shape and because the peak frequency is at around 45kHz. 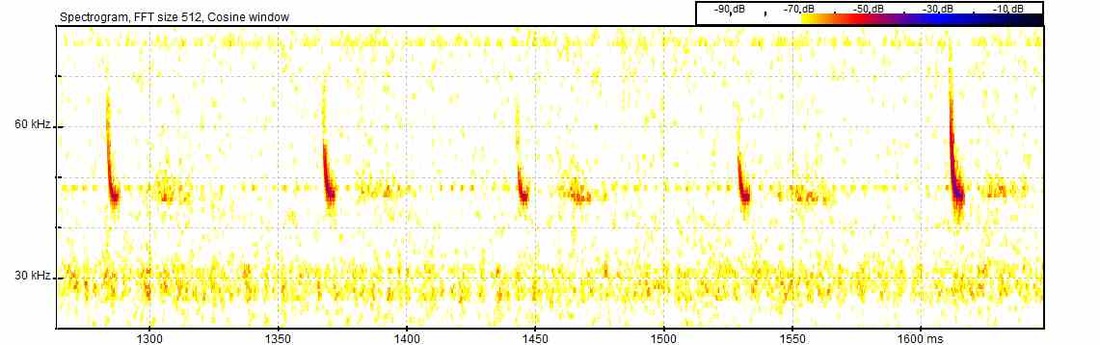 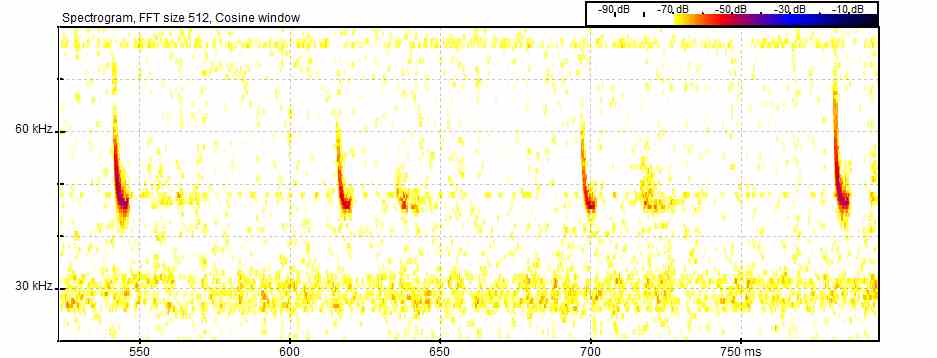 We are going to continue to explore the potential of both the quad and the fixed wing as platforms for bat detectors.
Watch this space!
0 Comments
Way back when (in September 2014) during the initial phases of our project we were aware that flying a drone might have some legal implications so we took some care to search through the specific legislation (from the CAA, mostly Air Navigation Orders) and find out what we needed to do to stay within the law. You can check out the post here.
I (Tom A) recently gained my Permission for Aerial Work, this is the qualification you need to undertake commercial drone work in the UK. So we wanted to document the steps someone would need to take to use our bat-drone commercially in the UK, should we create a working platform. Please note that 'commercially' in this case also refers to research undertaken by universities. The following also only applies in the United Kingdom. Civil Aviation Publication (CAP) 393 is the legislation that covers drones and it stipulates that: "The person in charge of a small unmanned aircraft must not fly the aircraft for the purposes of aerial work except in accordance with a permission granted by the CAA" 'Aerial work' here means commercial work in the broad sense, including exchange of services or a crate of beer for example! The 'permission' that is mentioned is granted by the CAA after an individual has undergone training and in this way is similar to a license. To get this we must:
This is a fairly significant investment, totaling approximately £1500 but would be required before you could do any commercial activities or get insurance. A 'Permission for Aerial Work' is not required if the activity is not commercial. For example if you were just flying a bat drone around for fun you would be allowed to do so as long as you kept within the law:
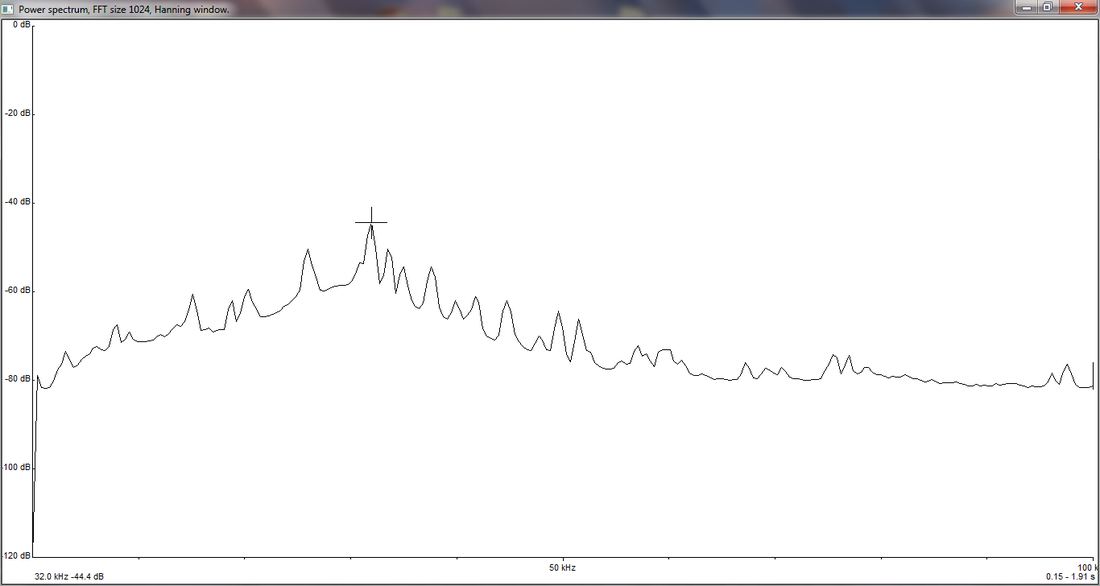
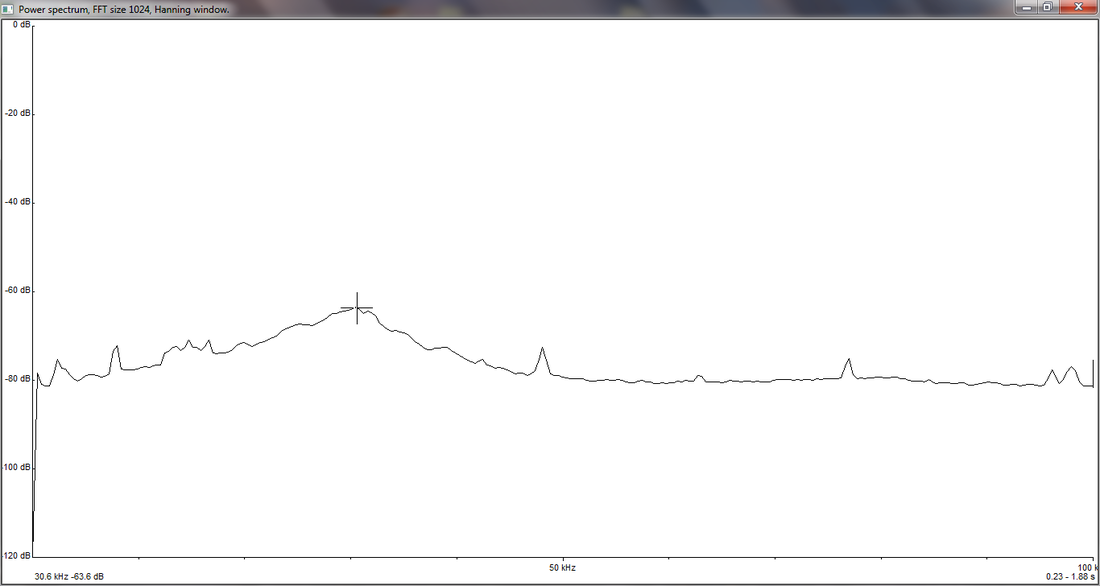
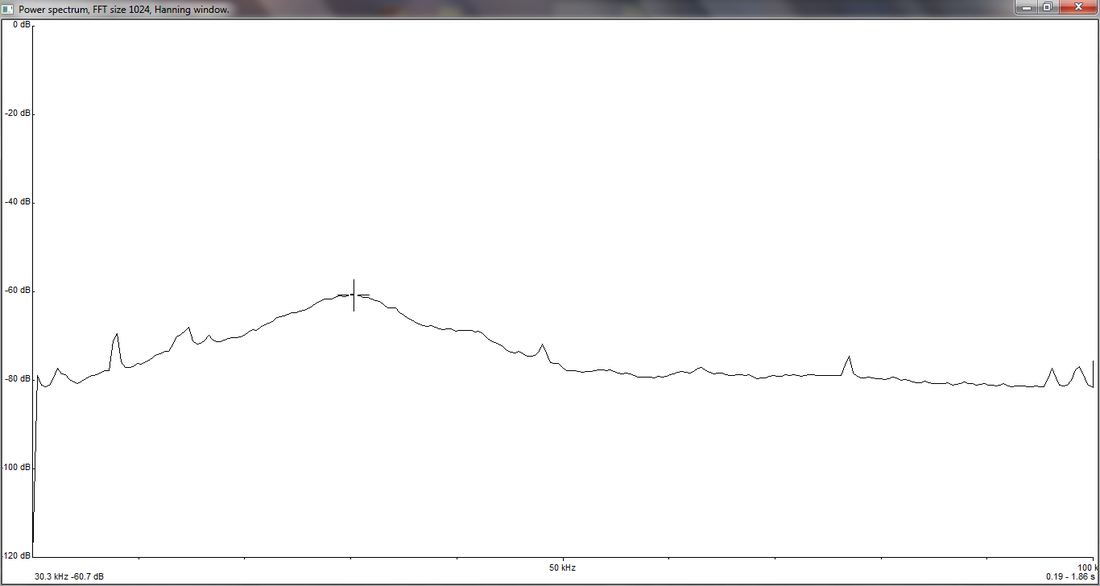
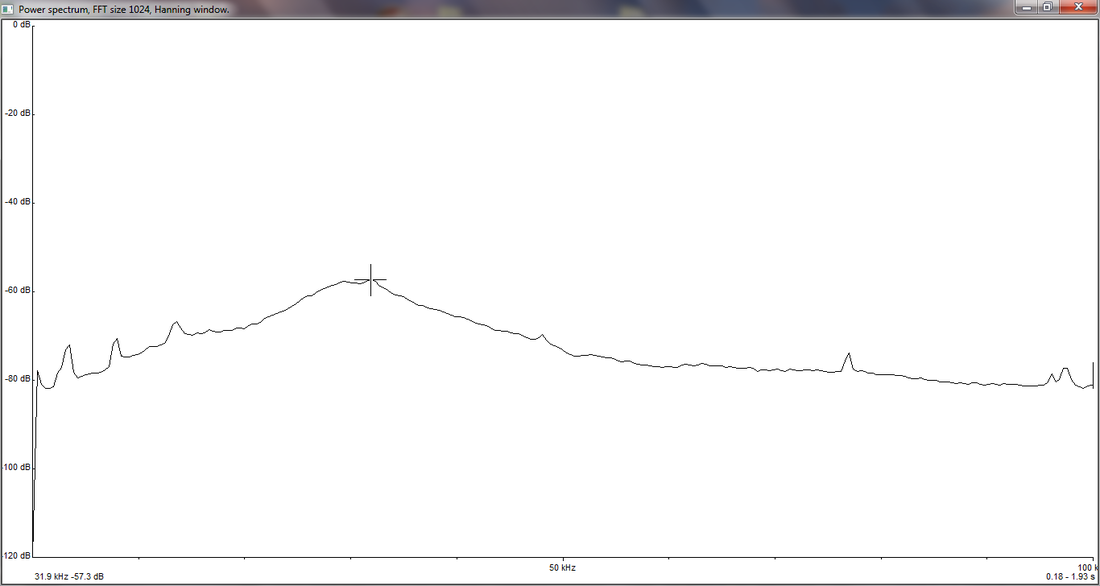
The CAA have actually released a number of simple steps called the 'Dronecode' which give you a handy reference for what you should and shouldn't be doing with your drone. You can check it out here: https://www.caa.co.uk/Consumers/Model-aircraft-and-drones/The-Dronecode/ If you did want to use a bat drone commercially and did not want to get the qualification yourself then the alternative is to hire someone else to do it for you. If you managed to read our first post about the Batboat (here) then you'll know that we had a couple of issues with its performance. This was mainly that at low speeds, the maneuverability was poor. The idea we had to fix this is to add a much larger rudder to the boat to increase the surface area and provide a larger moment on the boat allowing it to turn faster. Here's what we came up with:  New rudder side view  New rudder end view The new rudder has approximately four times the surface area of the old rudder and has managed to cut our turning radius at low speeds in half. It's made out of brass which is very corrosion resistant. We picked up the brass from a hardware shop and it wasn't too difficult to find and to work with. To attach the plate to the rudder we drilled a couple of holes in the rudder and the plate and put two bolts through which are secured with nuts. One consideration with the larger rudder is that we now don't want to travel as fast and make a large turn as this will put a lot more force on the rudder control servo and we don't want to strip the gears (within the servo). As part of this we've limited the throttle input to 50%. Another new addition to the Batboat is a Pixhawk flight controller with the rover firmware installed for ground based vehicles. Have a look here for the rover documentation. We've found a little space on the underside of the lid to put it on:  Pixhawk 'flight controller' 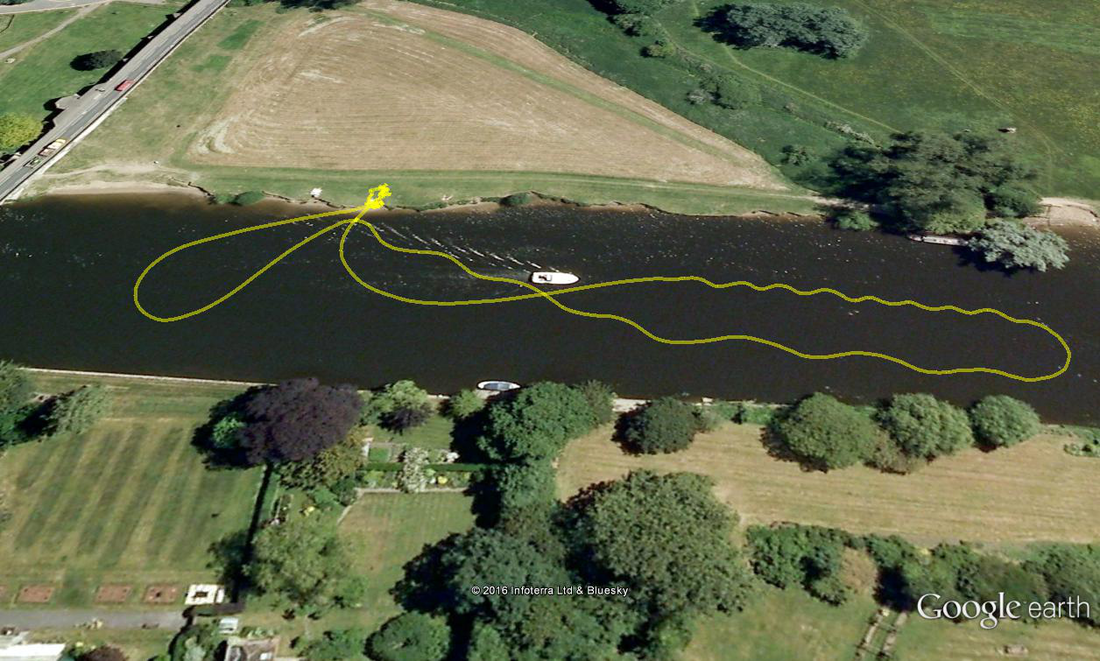 Batboat first autonomous run Just like the plane and quadcopter, the Pixhawk allows us to program in pre-set waypoints for the boat and for it to navigate to these waypoints autonomously. We managed a little test of this system up and down the river in a loop of about 150m which the boat navigated well though the PID settings require tuning (check out the weaving that we currently have on the image above). Unfortunately we don't have a video of the boat following the waypoints but we did have some fun after and do some drive-bys and soak ourselves so here's a video of that instead! Next step for the Batboat will be tuning the controller and some real world testing to record some bats! Stay tuned to see how we get on! The last time we flew the plane we pretty much smashed up everything but there was just enough left to test a new set of propellers that we got. There's no photo of the DJI q-tip prop unfortunately but if you imagine the DJI prop with about 5mm of the tips turned 90 degrees into the flow of the air then this is what it looks like! We tested each propeller for the amount of ultrasound that it gave off and here are the results. The axis along the bottom is the frequency and up the side is the volume, so we want the blade with the lowest peak.
Top left - clockwise: 3 blade, DJI normal, DJI with q-tip, Graupner eprop, below: Graupner slow fly 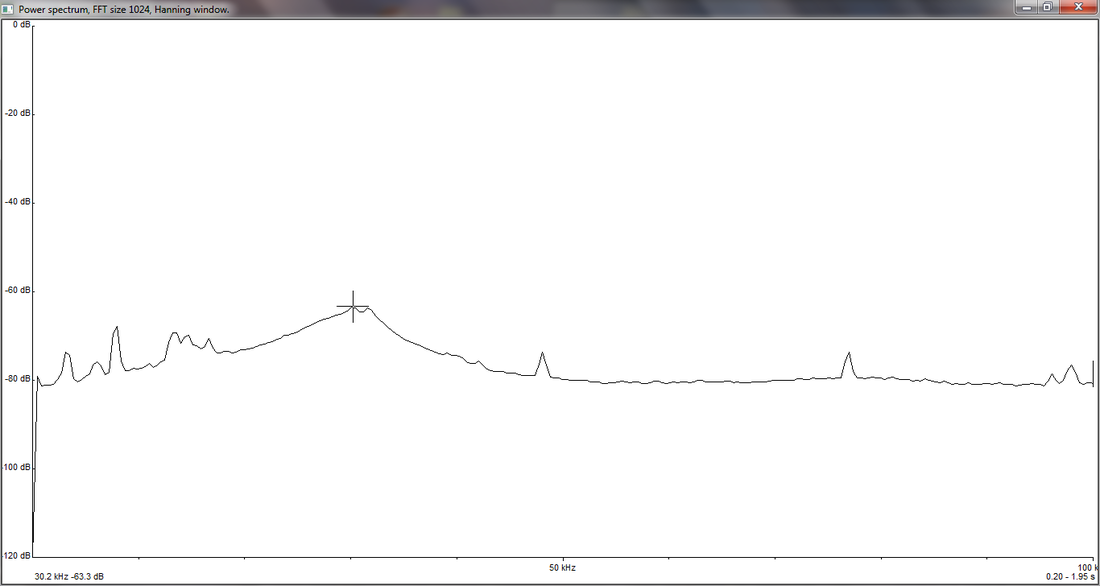 The Graupner slow fly propeller, above, (which is wider than the other propellers) was much quieter than the other props. In fact, since the volume is measured on a log scale (decibels) this propeller was 10 times quieter than the loudest prop - the three-bladed propeller.
This test demonstrates that the propeller in use does have a significant affect on the amount of ultrasound produced and that is is possible to reduce the ultrasound interference from this source. We always knew there would be ups and downs during this project and a couple of weekends ago we certainly experienced some downs. It all started out well, having been in touch with the University of Oxford we were able to use our plane to do some testing in Wytham Woods. Wytham is a small village north west of Oxford and the woods there are a site of specific scientific interest (SSSI) and as such are in use for a large number of research projects by the University. Our plan was to fly a circuit on the inside of a number of tree lines and see if we can record anything. The motor shaft of the Mk2 plane unfortunately broke during it's last flight (see the landing in the video) so we decided to use the Mk1 plane (the Bix3) and attach a composite tube on the underside at the back of the plane to increase the distance from the propeller to the microphone.  Tom M setting up The first flight using the stabilisation and auto-leveling on the flight controller (FBWA mode) went well and we were happy to go ahead and load up the waypoints and set off on an autonomous mission. Below is what we actually flew although the auto section (in blue) doesn't show accurate altitude. During the auto section of the flight the plane was actually increasing in speed and losing altitude. You might be able to make out the little plane models that are on the flight lines - these show the attitude of the plane.  Telemetry from the Wytham crash Unfortunately, the plane impacted the ground at the end of the auto line. It was a pretty hard crash and I'm sorry to say we don't have any photos as we were quite disappointed at the time and didn't think of this. As a brief description, the battery was found approximately 30 feet away (it was placed externally on the plane for CG control); the motor had unattached from its housing and the propeller had chewed through the flap and a part of the left wing before impacting the ground and breaking in several places (the only part of the prop left on the motor was the hub); the wings had also unattached from each other and broken their connectors to the fuselage; the fuselage itself was cracked in several places. So, this wasn't exactly ideal and to compound this, we had no idea why the plane crashed which was probably the major concern. After discussion with the programmers of the flight control firmware we discovered that the plane didn't have enough elevator authority to correct its descent and needed the PID settings to be updated. After a fair bit of time spent gluing small bits of EPO together we think the plane should fly again! This all happened on our first night of a weekend of testing. We still had a couple of days to try and get something flying so we moved onto using the Mk2 plane and testing this with a new motor.  The Mk2 ready for a test flight! Using a set up of a 4S battery on the Mk2 we were able to fly a test fight of the plane, fully loaded with the bat detector and landing gear (to help protect the motor and prop).
However, our costly weekend wasn't about to stop there and we discovered that when we used the 3S battery the prop just wasn't able to generate enough thrust for level flight and we floated down for fairly gentle landings. Given that we're already stressing the motor more than we should by using a 4S battery it's just not the right set up to fly the weight that we want to. The Bix3 wing that we're using isn't designed to fly with the wing loading we're putting on it. As our power system also isn't able to generate enough thrust we've decided that the current design of the Mk2 is not suitable for our needs. What we're therefore decided is we need a new plane that can support the larger flying weights we require (circa 3 kg). So, we're in the process of designing and building a Mk3 plane which should fit our needs really well! Keep your eyes on the blog for some specs and 3D models of what we're looking to build! |
Categories
All
Archives
March 2017
|




 RSS Feed
RSS Feed
