|
To borrow a title from a former chancellor of our alma mater; in this post we'll provide a paraphrased history of the project from inception to the present day. Intro and early days Getting straight into it - the idea for the project came from a conversation between Tom M & Tom A at a friends' wedding in 2014 - thanks Andy and Michelle!
 The first 'bat drone' During the project we've been very fortunate to be invited to the Natural History Museum to give a talk and have a stand at a couple of events. One of the questions that comes up most often is "what company or university are you at?" We're not. The project is simply a very enjoyable hobby. We want to help further bat conservation it's a great way that we can assist with this using our respective skills. Tom A is our bat expert (and is now a qualified and competent drone pilot) and Tom M is our drone designer, builder and operator. We think this goes to show that if people are willing, you don't need the support of a big research grant or institution to push boundaries. Our advice is to "give it a go and see where it takes you".
We knew that quadcopters produced a lot of sound but didn't know how much of this was ultrasound. Our first tests showed us that it was a considerable amount. This ultrasonic interference has been a running theme through the project. The problem lies in the signal to noise ratio of the bat call. If there is too much noise from the drone we won't be able to 'hear' the bat call. This meant that we had to separate the drone and the detector recording the bat calls by about five meters. The highly technical application of a piece of string was employed though this wasn't without it's problems as you can see in the video below. The problem of the oscillation arose due to the high weight of the detector. We were glad we used a water bottle of the same weight as the detector in testing! The detector and recorder weighed about a third of the quadcopter mass. This led to loss of control and meant and it wasn't an option in this configuration. In going back to the drawing board we wanted something that produced less noise and could comfortably fly with the payload of the detector. The obvious choice for us was to move to a plane; it had the added bonus of being able to fly for longer too (about 8 mins for the quad and 25 for the plane). Bat Planes  Tom A with the first bat plane We still had some noise issues with the plane but it was at least quieter than the quadcopter. The downside was that due to the weight of the detector we had to place it and the recorder (as they were two separate bits of kit at this point) on the centre of gravity. This meant they were very close to the propeller and the noise was higher than we would have liked. A major breakthrough in the project came when a company called Peersonic contacted us and offered us one of their prototype light weight detectors. This was a revolution and it meant we could put the detector out on the wing (as in the photo above), away from the propeller.
Due to the noise that's present we then focused on separating the detector and the propeller (the source of the noise) by as much distance as possible. This led to the development of two custom planes - the Mk II and Mk III.  Tom M with the Mk II The Mk II was underpowered for its size so we developed the Mk III from the ground up to be a long duration and slow flying vehicle. Whilst this worked, it's also not terribly portable due to its 2m wingspan. Both planes are able to separate the detector from the propeller by approximately 2m due to their long fuselages. Keeping with the plane thread, we finally bought an airframe manufactured in China and originally designed by Lockheed-Martin - the X-UAV Talon. This is also a very capable plane, able to fly for a long time and at relatively slow speeds - something we think will be useful for surveying.  X-UAV Talon with extension for detector placement The extension you can see in the photo above allows us to mount the microphone of the detector away from the propeller which is at the back of the plane. This allows for a maximum separation of approximately 1.5m. Interestingly, we found during noise testing that the quietest position is actually just 15cm off the nose. The Talon is our newest and most capable plane which can fly for well over 100km should this be required. We're looking to perform real-world testing with this platform in the summer of 2017. This brings us up to date with the planes. During the above developments we've also been working on the quads! Bat Quads With the lightweight Peersonic detector we thought it would be worth re-visiting our original quadcopter as the oscillation problem should now be solved. Fortunately, this did turn out to be the case and during some field testing we recorded quality bat calls using this setup.
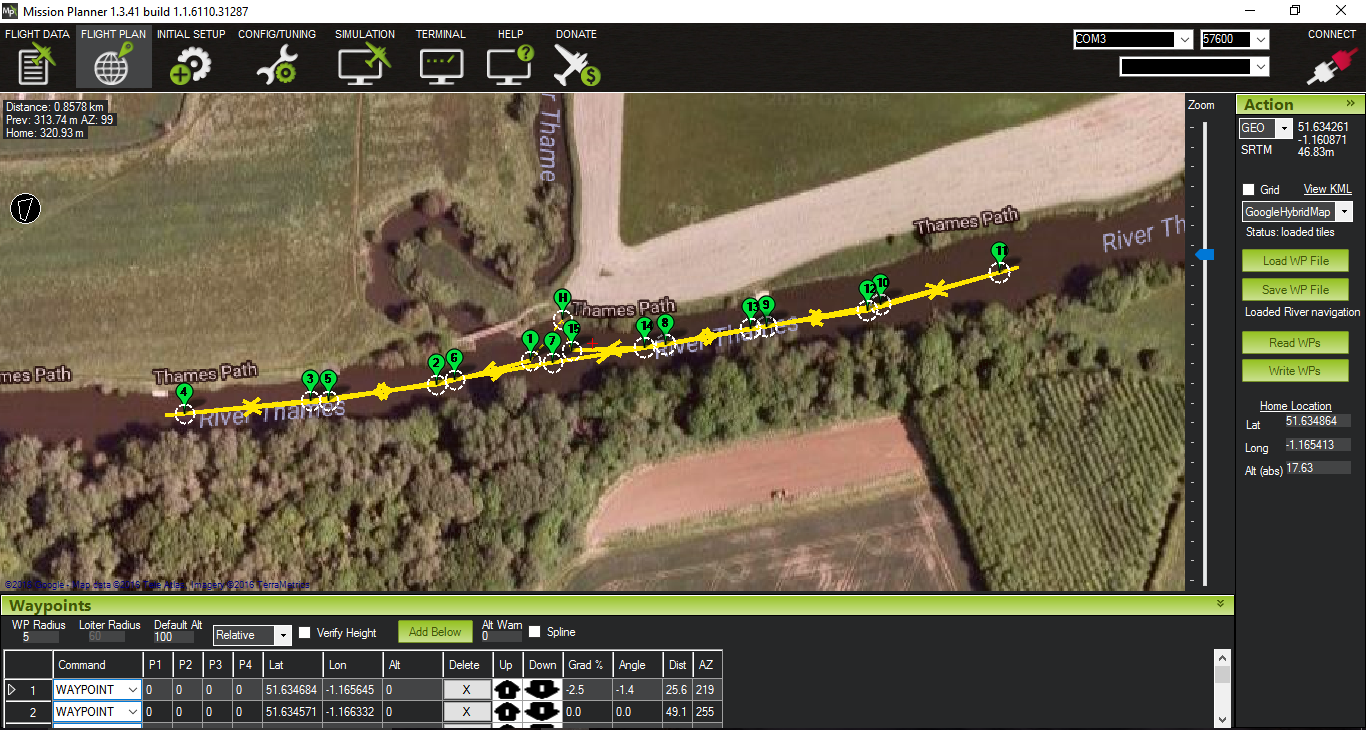
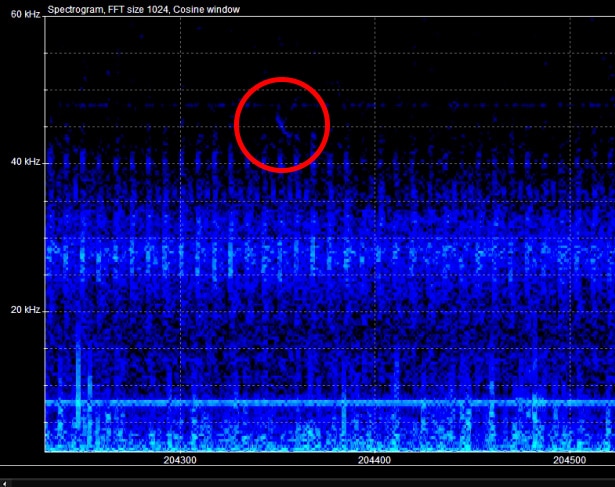
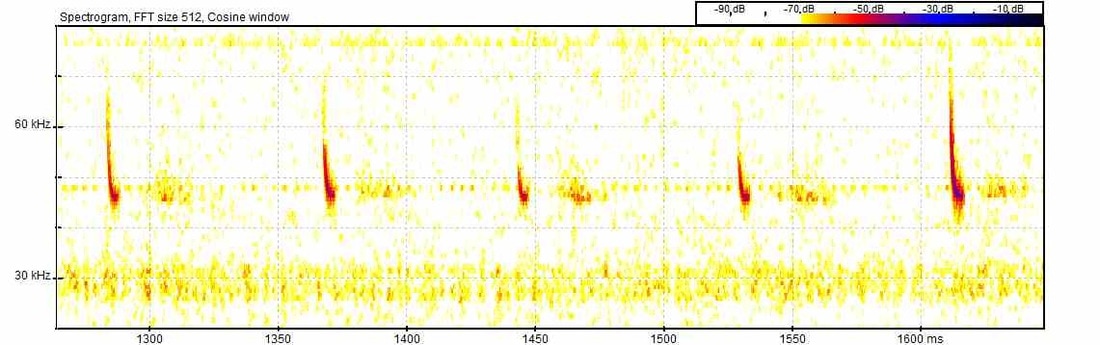
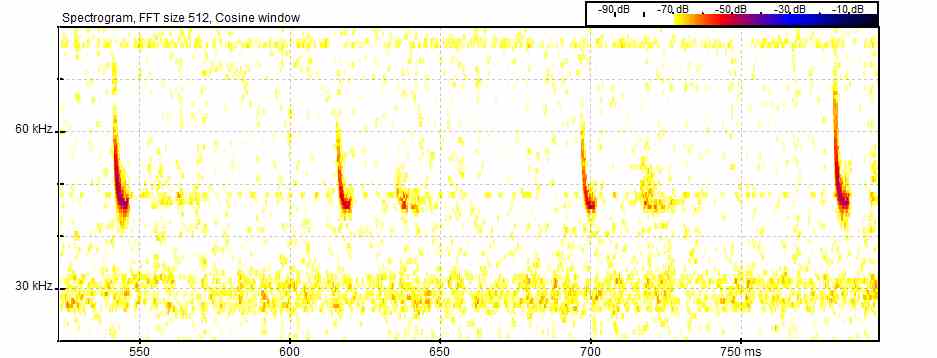
 The second 'bat quad' - Quad MkII The Quad MkII above has been designed and built specifically for the project. It's a great example of when a DIY solution can equal or surpass more expensive commercial options. If we took the capability requirements of this quad to a UAV specialist it would cost in the thousands of pounds. As it stands, we built this ourselves for approximately £650. This also brings us up to date on our quadcopter drone investigations. But wait... there's more! Not content with surveying bats from the air, we also thought there was scope for using a different type of drone to improve ground survey methods. In particular, on the water - that's right, we've got a bat boat! Bat Boat  The bat boat Some of the work we've done on the boat includes investigating the noise produced, adding in autopilot and also improving the turning circle. The first real-world test on the boat was at a site Tom A had surveyed already on the Thames in Oxfordshire. We knew from the survey that and common pipistrelles were present and we wanted to see if we could pick these up using a detector on the boat during a transect of the river. We were able to successfully pick up both species and also developed a web app to assist with identifying the bat calls within the recordings: This isn't to say we had no issues with the boat though - unfortunately the turning circle isn't fantastic and we did spent a little time in the river retrieving it! We'll be focusing on improving the turning circle (through altering the rudder position) and changing a number of the settings that control how quickly the boat turns. As it stands the boat is ready to survey and would be perfect for something like a lake or wider river where turning circle isn't important. Summary This has been a fairly rough and ready summary of our project and there were numerous smaller experiments along the way where we tried out different ideas which have all been documented in the full blog.
Aside from this, it's also worth considering the legal restrictions and requirements of flying drones. This is a really important consideration so we created a section just for the legal stuff on the blog (all applies to the UK). So, to sum up in the simplest terms possible: we have three different types of bat drone which have all successfully recorded bats. The next step in our project is to collaborate with ecology consultants and researchers to use the drones in the field and show they're a useful tool for bat conservationists.
0 Comments
Leave a Reply. |
Categories
All
Archives
March 2017
|


 RSS Feed
RSS Feed
