|
If you managed to read our first post about the Batboat (here) then you'll know that we had a couple of issues with its performance. This was mainly that at low speeds, the maneuverability was poor. The idea we had to fix this is to add a much larger rudder to the boat to increase the surface area and provide a larger moment on the boat allowing it to turn faster. Here's what we came up with:  New rudder side view  New rudder end view The new rudder has approximately four times the surface area of the old rudder and has managed to cut our turning radius at low speeds in half. It's made out of brass which is very corrosion resistant. We picked up the brass from a hardware shop and it wasn't too difficult to find and to work with. To attach the plate to the rudder we drilled a couple of holes in the rudder and the plate and put two bolts through which are secured with nuts. One consideration with the larger rudder is that we now don't want to travel as fast and make a large turn as this will put a lot more force on the rudder control servo and we don't want to strip the gears (within the servo). As part of this we've limited the throttle input to 50%. Another new addition to the Batboat is a Pixhawk flight controller with the rover firmware installed for ground based vehicles. Have a look here for the rover documentation. We've found a little space on the underside of the lid to put it on:  Pixhawk 'flight controller' 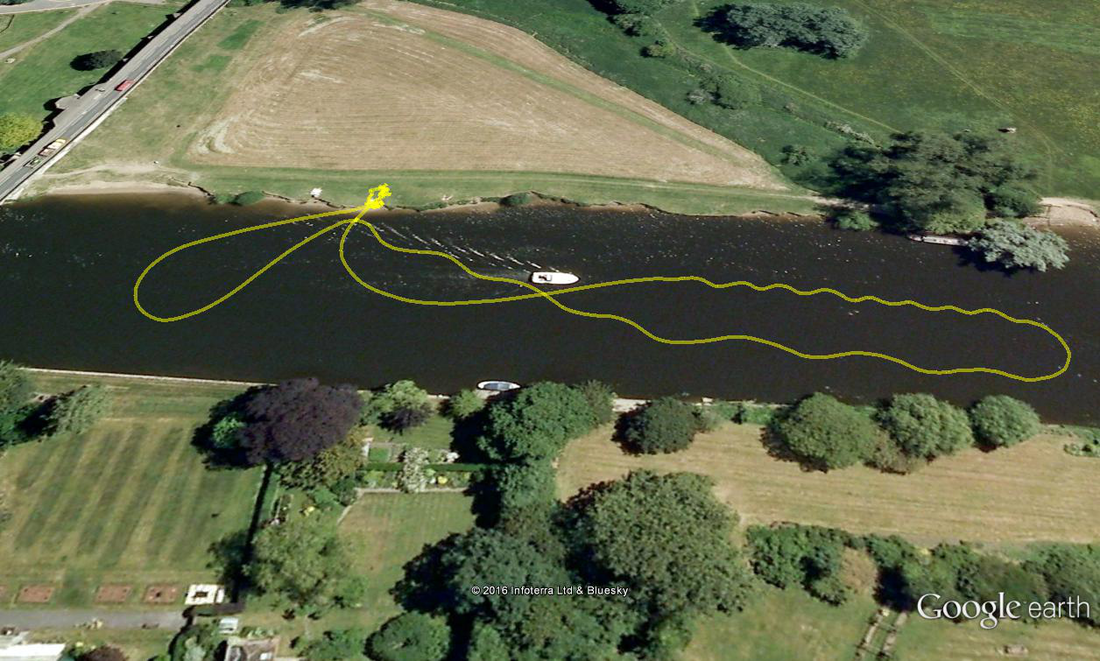 Batboat first autonomous run Just like the plane and quadcopter, the Pixhawk allows us to program in pre-set waypoints for the boat and for it to navigate to these waypoints autonomously. We managed a little test of this system up and down the river in a loop of about 150m which the boat navigated well though the PID settings require tuning (check out the weaving that we currently have on the image above). Unfortunately we don't have a video of the boat following the waypoints but we did have some fun after and do some drive-bys and soak ourselves so here's a video of that instead! Next step for the Batboat will be tuning the controller and some real world testing to record some bats! Stay tuned to see how we get on!
0 Comments
Leave a Reply. |
Categories
All
Archives
March 2017
|
 RSS Feed
RSS Feed
