|
In our efforts to replicate all of Batman's modes of transport in miniature we thought the Batboat would be a fairly easy hit... This was an idea which originally came about from discussing the possibility of monitoring bats over water using the BatUAV. We then thought, why not just use a boat? This idea was put aside as we were concentrating on the planes but later on Peter at Peersonic also had the idea independently and put it to us. The result is this fine vessel:  Canados 90 Oh wait, no, that's not the one... This looks more like it, the little one called Princess:  Princess So we've ended up with a boat from hobbyking called Princess. She's about 1m long and 30cm wide and can travel incredibly quickly (at about 35mph, which we don't need but it's always fun). There's quite a few challenges to overcome in using a boat autonomously:
We've plugged in a Pixhawk flight controller which can run Ardurover which controls ground vehicles such as a boat. The Batboat works just fine using this. Have a look at our video below for the initial runs. As for the ultrasonic interference we've tried out a new microphone from Peter which discriminates against 8kHz and below (to try and cut out some interference). Below are some sonograms of the results at the bow and the stern. Bow 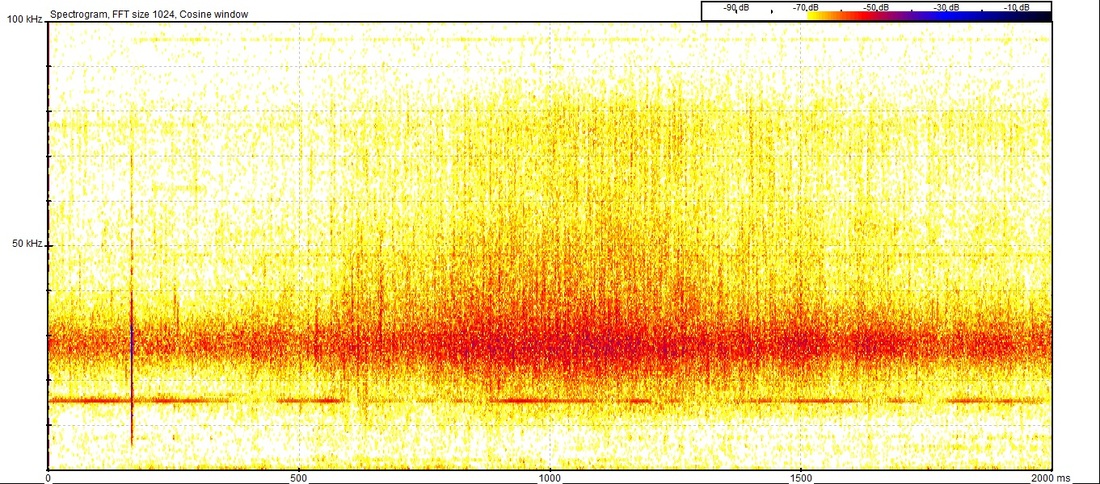 Stern 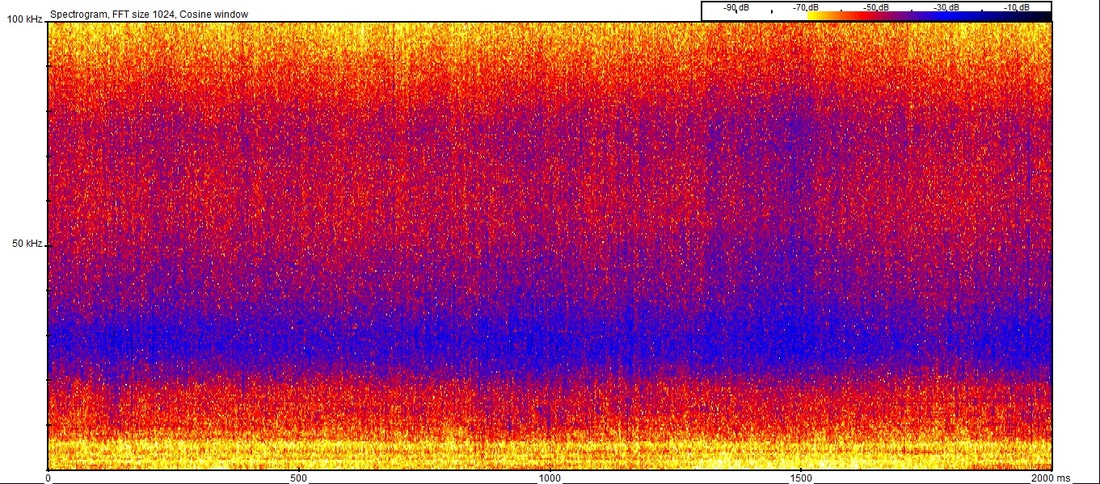
Obviously, the interference at the stern makes the microphone here essentially unusable. The bow is much better but we'll need to protect the microphone from any splashes. Hopefully we'll be able to turn off the motor and ensure there's practically zero interference whilst collecting data. Exactly how this is going to work in moving water is uncertain at the moment as we'll need to test position hold. We didn't manage to fit in any GPS testing (ie autonomous piloting) but watch this space for more testing soon!
2 Comments
31/5/2016 08:47:53 am
Hi Guys,
Tom
1/6/2016 12:41:03 pm
Hi Jan, Leave a Reply. |
Categories
All
Archives
March 2017
|
 RSS Feed
RSS Feed
