|
It's all coming together! We have a rig that allows us to attach an ultrasound detector and recorder to a UAV (have a look here on how we did this), and we can use gliding flight to record without interference from the engine. So we gave it a go: Flying the drone around on a loop we used a ultrasound source to produce noises that the on board recorders would pick up. The results are promising. When flying overhead at around 20 meters the detector was able to pick up the ultrasound signals emitted from ground-level. Since bats are often flying at tree height this gives us a good chance of picking them up in flight. 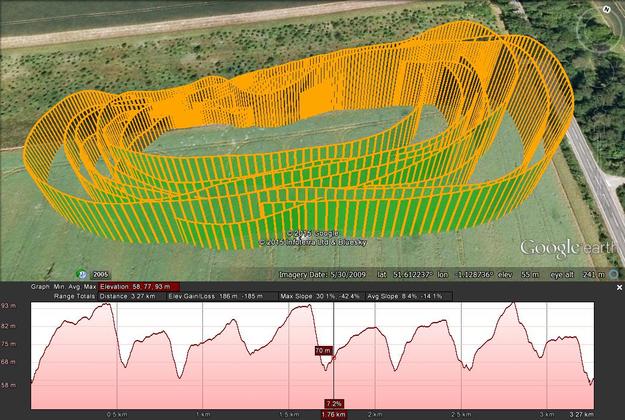 The flight telemetry from our test flight. You can see the gliding sections at the back flying right to left. Below is the elevation profile of the flight. The glide slope we experienced was approximately 3.5:1, meaning that for every 1 meter altitude lost we flew 3.5 meters laterally. This isn't particularly good and the glide slope was reduced by the fact we were flying into the wind whilst gliding. Although this provides additional lift, the reduced ground speed has a large impact on the slope. In future flights we'll fly the glides downwind as much as possible. The next step will be to plan and fly an autopilot mission using the gliding method to try and record an ultrasound source. It's worth noting that we don't think this is the ideal solution and would much prefer to be able to record all the time so we're looking at other options for this.
0 Comments
In our previous tests we have shown that ultrasound interference is an issue (here and here) and that suspending the detector away from the engine is difficult (here, here, and here). One way to beat this problem is to turn off the engine and glide. If we take this approach then the detector rig can be mounted on the aircraft directly. A couple of things to consider:
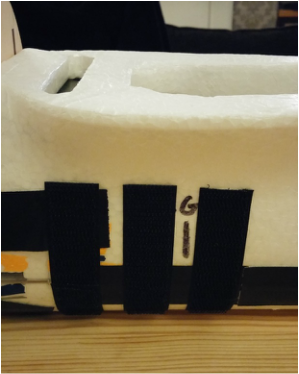
 We then placed Velcro strips on either side of the plane where we are going to attach the detector and recorder, and on the devices. This makes it easy to attach and remove the devices.
First we found the center of gravity and marked it on the side of the plane 'CG'  The detector and recorder fitted on really nicely to the Velcro which seemed pretty secure.
To make sure that these don't fall off we put the lanyards around the pins that secured the wings, when the wings are in place this means there is no way they can fall off even if the Velcro fails.  Next up we'll try testing the rig in flight and seeing if we can record some ultrasound!
Having pretty much decided now that a quadcopter is just too noisy for this project, we've taken the plunge and are now the proud owners of a Hobby King Bix 3:  This plane was chosen primarily because it fulfills some basic requirements:
Once we'd put the plane together we needed to get into some flight testing. The first flights used manual mode. These went badly due to a poorly managed centre of gravity (CG) which needs to be accurately placed. Here's the result which we had to patch up:  First successful flight now done we can move on to testing more features of the flight controller. Most important of these is the autopilot which will fly between a set of waypoints. Here's a map of the first route we'd set for our plane: When we turned on stabilisation mode (something to assist with flying) this was somewhat of a disaster as it turns out that the aileron controls were reversed in the flight controller leading to further crashes. A somewhat large amount of gluing and fixing later and we finally we worked out how to use our plane and using Fly-By-Wire-A mode. We achieved successful stable and in control flight with this mode. We were pretty chuffed as after the numerous crashed we'd given ourselves about a 25% chance of achieving a decent flight this time round. 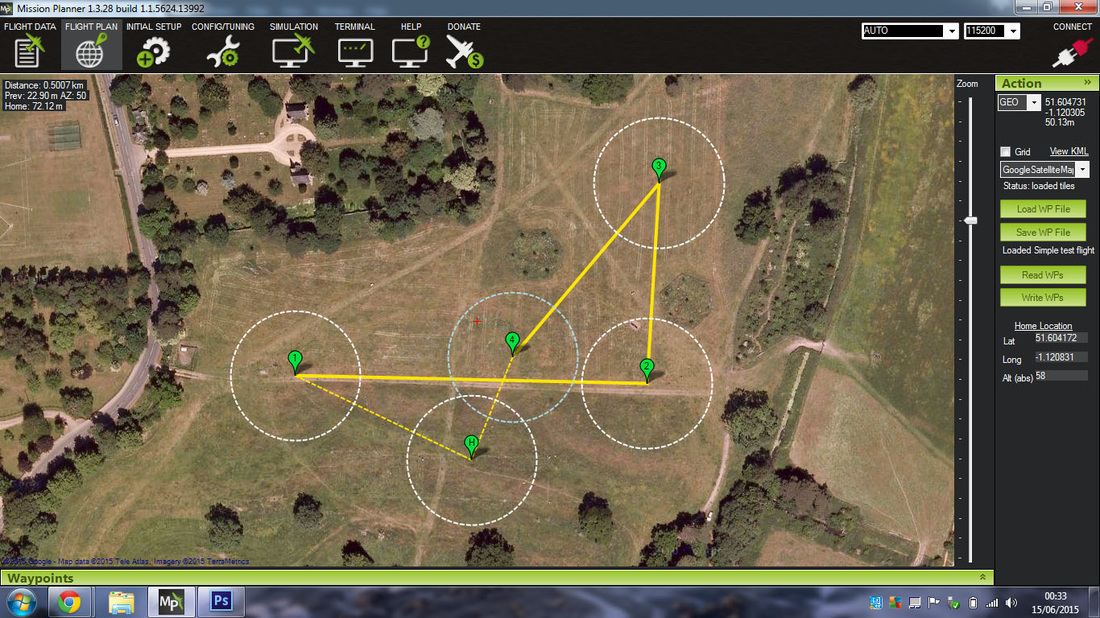 And below is the plane actually flying the route. Note that the waypoints are are in three dimensions so not only are they points on the map but they also have altitudes. We'd designed a route for our plane that took it to 50m altitude (relative to the ground level where we took off from).  So what have we achieved? We now have a functional platform which can perform autopilot routes! Despite the crashes t's been a very successful weekend. We're looking to move onto longer autopilot routes next time and in-flight testing of the ultrasound recording equipment. |
Categories
All
Archives
March 2017
|



 RSS Feed
RSS Feed
