 Here's a quad! This one's a DJI Inspire 2 If you've been following the blog for a while (and maybe even follow us on twitter - @project_erebus) then you might know that we've tried both successfully and unsuccessfully to use a quad in the past and are building a new quad for the project. In fact, it's the one flying drone that we've been able to record some really good bat calls from (see the 'successfully' link above). In this post we're going to briefly cover problems using quadcopters and how we're now overcoming these issues. We've written about what quadcopters are capable of, and finally an overview of what's on the market to buy and a bit about building your own. If you've ever considered getting into bat droning then this will hopefully help you find one that works for you. Background Originally, we struggled to make quads work for us. We had problems such as a swinging load issue; short flight times of about 10 minutes and ultrasonic interference. Recently, with the Peersonic detector and the Soundtrap detector, we've been able to overcome the ultrasonic interference - by placing the detector further from the quad - and overcome the swinging load issue - the detectors are now much lighter and don't affect the flight of the quad to such a calamitous extent. However, the quad we were using for this testing (see here) is quite heavy and has an average efficiency meaning relatively short flight times. Happily, technology has come on somewhat in the time we've been progressing the project and we're now ready to re-visit the quad as a capable vehicle that we think probably has the best chance of succeeding as a flying 'bat drone'. After we posted about the pendulum detector issues we hypothesised that a quad would be a very capable bat drone though we didn't have the funds to capitalise on this at the time. Fortunately, we've had a very kind donation since then from Belos Ecology and along with our own funds we've been able to put together a new quadcopter which we hope will provide us with the platform to collect some strong data and make progress with the project. We'll be posting about the build and design of this soon. What are multirotors capable of? We're focusing on flight times and ease of use as we feel these are the most important factors for new users to consider. We want you to be able to get out there and get bat droning with ease so we've put together a few options that should help you with this. You should also be aware that there are important laws that users must obey regarding the use of drones. For commercial users in the UK there are some requirements that you have to fulfill in order to use a drone; have a look at our blog post here. For recreational users (such as ourselves) there's a great website put together by the CAA (civil aviation authority) and NATS (national air traffic services) which can be found here; of particular interest is the drone code. There are a number of multirotor options available, such as quadcopters, hexacopters, octacopters and more niche designs such as X8, tri-quads and co-axial copters. We're going to focus on standard layout quadcopters as these are an elegant, simple and proven design. With regards to capability, multirotors have relatively short of flight time. You'll be looking at a flight time of 20-25 minutes per battery for a normal quadcopter like a DJI Phantom series and up to an hour for specifically designed and built quads. This is a very fast paced area for development and flight times are constantly improving. The record flight time for a small quad for example is just under four hours though this uses a specialist hydrogen fuel cell power supply. Something worth noting is that the flight times given for models are really hover times rather than a measure of the 'useful' time you can fly for. The quadcopters are holding position and not spending any excess energy on making any changing lateral movements. A further note is that if the quad is travelling in a straight line there is additional wind flow over the propellers resulting in more lift - which is called translational lift. This will increase efficiency and flight time, although only up to a point, which is where the energy put in to gather the speed outweighs the efficiency gains from the translational lift. Buy or build? The first question to ask is, 'What do you need in order to capture bat calls from a drone?'. Let's take a look below:
For most people we think buying a quad is going to be the easiest route into using a bat drone. If you're into DIY projects and maybe even have a little soldering experience or would like to learn about this sort of thing then by all means have a look at our guide to building and/or designing your own below. So, what's a good flight time for a quad that can be bought or built? It depends on the weight of the payload, in our case the bat detector, but generally if you can achieve greater than 20 minutes useful flying time then you're doing well. If you're achieving 30 minutes then be very happy and anything over 45 minutes of useful flight time is exceptional. For example, DJI make a claim of 27 minutes maximum flying time for their Mavic quad which is very impressive. It does seem this flight time was aided by a flying speed of 15 mph thereby providing further translational lift; as evidence of this, the maximum hover time is lower at 24 minutes. In terms of ease of use between bought or built it really depends on the 'brains' of the drone called the flight controller. This is the clever electronics which can enable autonomous operation and all sorts of interesting flight modes, such as altitude hold, loiter, follow me and follow waypoints. DJI make great flight controllers which you find in their quads or buy separately to use in your own build. There's also a community based flight controller based on Ardupilot firmware which we use. It runs on various hardware and we're using a 3DR Pixhawk flight controller. Again, this allows a lot of interesting flight modes which suit our needs. We would suggest at a minimum you ensure the flight controller has GNSS (like GPS and/or GLONASS) and the ability to follow waypoints. Buying a bat drone? See below! For the majority of users this is going to be the easiest way into working with a bat drone. There are a number of great multirotors on the market which offer excellent reliability and build quality as well as great flight times and very intuitive user interfaces. Which one suits you may well depend on the cost. Generally, as you pay more you increase the flight time and the payload the multirotor can carry. Starting costs are realistically between £300-400 and you can spend up to several thousand pounds. The most recognisable manufacturer of ready to fly multirotors is DJI. They make quads such as the Phantom series and Inspire series. We've been experimenting with a Phantom 3 recently and found it to be very capable. There's a lot of really great features and nice little touches, such as screw on propellers, smart batteries (which discharge themselves to a storage voltage after a set time), and a fantastic user interface (which is an amazing selling point). Plus, they're really easy to fly quads that can get you flying great straight out of the box with a simple setup procedure. If you want a really straight forward way into flying your own bat drone then you can't go wrong with DJI. You'll be looking at a flight time of around 20 minutes and a cost of between £300 for a second hand Phantom 2 on eBay to £3000 for a new Inspire 2. Downsides are that additional batteries are quite expensive (relative to DIY options) though they are the 'smart' batteries as mentioned above so at least this lets you feel a bit better about it!  DJI Phantom 2 We would also recommend a company called 3DR. They manufacture a quad called the Solo and although they've re-focused on commercial applications recently, and re-branded and re-priced the Solo for this market, you can still pick one up second hand. 3DR also make the Pixhawk flight controller that we use in all of our drones. You can find a second hand Solo on eBay for around £350 and should be looking at a flight time of just under 20 minutes. Although we haven't used a Solo it runs off an adapted version of the same flight controller firmware we use so it's also very easy to fly and offers all the necessary features required.  3DR Solo If you're looking for something that'll fly for a bit longer then this is certainly possible with a ready to fly quad. DJI make a heavy lift (larger payload) hexacopter called the Matrice 600 and a smaller quad version called the Matrice 200. It's designed as a professional filming platform and can fly for just under 40 minutes with a very light payload like a bat detector. The reason its a hex rather than quad is for redundancy as a hex can fly with a damaged motor/prop. The only issue is that the pro version costs £5200 and you'll need the optional extra improved batteries to maximise the flight time. What we'd recommend is that you contact someone at heliguy.com or uavshop.co.uk. They'll be able to put together a custom build for you. We've dealt with them in the past for some advice and they're very knowledgeable, helpful and friendly. It's also the easiest option for a ready to fly long duration multicopter, though certainly not the cheapest!  Custom Tarot 650 Credit: radioc.co.uk Build and/or design a bat drone This section will only be of interest if you're into DIY projects. If you would like to give it a go yourself then read on! One of the major benefits to either building your own multirotor is that it's much more affordable for (hopefully) an equivalent product. Obviously, the downside is that it requires quite a large time investment and the learning curve can be steep. It can be quite daunting so if you would prefer to follow a known working model then the next blog post will be about our new quad and you're welcome to use this as a template. We'll be looking at general design here with a focus on flight time. If you'd prefer to do it all yourself then we'd recommend Youtube as a great source of information on how to build and design multirotors. There's a channel called Flite Test which do a beginner series that has a number of applicable videos on batteries, transmitters, power systems and the like. Check it out here as a starting point. You also might want to check out the following links to get you started:
Our understanding in design starts with a few basic rules. One is that bigger rotor blades are more efficient. Another is that lighter is always better. Finally, if we're dealing with electric powered multirotors - which we are - then in general a higher voltage power system is more efficient. To make the quad fly for longer we could just add more batteries which works to a point. Batteries increase the weight thereby increasing the thrust required and for a given motor and prop this usually decreases the efficiency so there's a tipping point at which adding more batteries actually decreases flight time.  Credit to flyingtech.co.uk If we're going to be building a quad then we'll need to procure all the necessary components. Here's a list of parts you'll need to put together your own quad:
When we're designing a quad the first part of the process is to work out how much it'll weigh. This will then let you find a motor and prop combination that provides the required amount of thrust and this then dictates the ESC and voltage of battery required. This is a bit of a catch-22. What we're going to do is work backwards a little. First look at how large you want the frame to be, this then gives us a prop size which we can match to motors and go from there. When you've added up the weight of the components then have a look at the thrust table of the motor. They describe the performance of the motor. They're not always available for every motor. Good brands such as T-motor and KDE provide them for their motors and they're often available for motors on Hobbyking as well (one of the big suppliers). Here's an example thrust table for a T-motor MN3510: 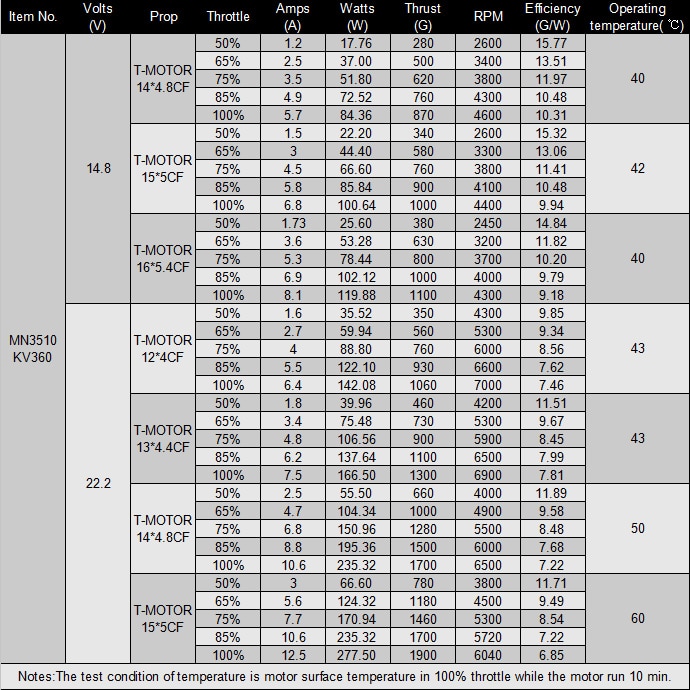 Thrust table for a T-motor 3510 360KV brushless motor What we're interested in is checking that the prop size suits our frame. Let's say we've chosen a frame size of 600 (this is the diagonal length in mm between the motor centres). We can have up to a 16" prop but would probably be more comfortable with 15" or 14". Looking at the prop sizes from the chart, we're ok with this motor as they've specified that it uses 12-15" props. Props are described by two numbers eg 1550 or 15x5. The first two numbers are the length of the prop from tip to tip in inches. The second set is called the pitch of the prop and it describes how angled the propeller is. In an ideal world, it's the length of air displaced by the prop during a full rotation. The CF simply denotes they're made of carbon fibre. Sometimes you'll see these numbers written like 15x5 or sometimes both together like 1550; they mean the same thing. The next part of the process is to check the thrust output relative to the weight of the quad. The full weight of the quad including everything you'll be lifting is called the AUW (all up weight). We're looking for the thrust at 50% throttle to be equal to the AUW. This ensures a controllable platform that is running at an efficient level. Let's say our AUW comes to 1400g. Looking at the table we can achieve this thrust at very close to 50% using a 4S battery (14.8V) at a high efficiency of around 15 g/W using a 15x5 prop. Any efficiencies over 10 g/W is good. Next up, we need to look at what ESC we'll need. The ESC has two numbers you need to be aware of. The first is what voltage it can deal with. This will be listed in terms of the number of Lipo battery cells in series (for example 2-4S or 2-6S; you can calculate the actual voltage by multiplying the number of cells by 3.7V which is the nominal voltage of a Lipo cell). You need to pick one that can deal with the voltage of battery you're using. In our case 4S needs to be covered. The second number is the continuous current the ESC can handle. This will be listed in amps, such as a 15A ESC. Generally, the lower the continuous current, the smaller and lighter the ESC, which is beneficial. Looking at the table, we can see that our motor, prop and battery combination will draw a maximum of 6.8A. This is per motor but that's ok as we need one ESC per motor. So, a 10A ESC would be absolutely fine provided it can deal with the voltage from a 4S battery. You'll also need some sort of flight controller which will assist with translating the transmitter stick inputs into actions for the motors to slow down or speed up. More advanced flight controllers offer additional functionality using more advanced sensors (see below). We would highly recommend an Ardupilot based controller such as the Pixhawk 2.1 (we have the Pixhawk 1, the 2.1 is the newer version). This enables a host of great features as it integrates sensors such as a barometer for altitude control, GPS for position control and accelerometers and gyros for attitude control. This means the quad can operate autonomously once provided with a set of waypoints or instructions. A DJI flight controller is also an excellent option though this is a little more expensive. The Naza-M V2 is a good option and is their cheapest available. Finally, there's the small matter of a frame to mount all of this kit on. You know the size required so can easily buy something off the shelf or if you're looking for the ultimate in weight saving you can make your own from light materials like carbon fibre plates and tubes. If you do decide to build and/or design your own multirotor then do get in touch with us as we're happy to hear about your progress and offer advice and support where we can. Next up, we'll be writing about the build of our new quad! Watch this space.
4 Comments
2/3/2017 07:10:59 pm
Do you have a blog/post regarding the rules and regs around use? I'm assuming you can't just fly a drone at night wherever you want.
Hi Dave,
Dave
4/3/2017 06:18:59 pm
Thanks Tom, will have a ganders. Leave a Reply. |
Categories
All
Archives
March 2017
|
 RSS Feed
RSS Feed
