|
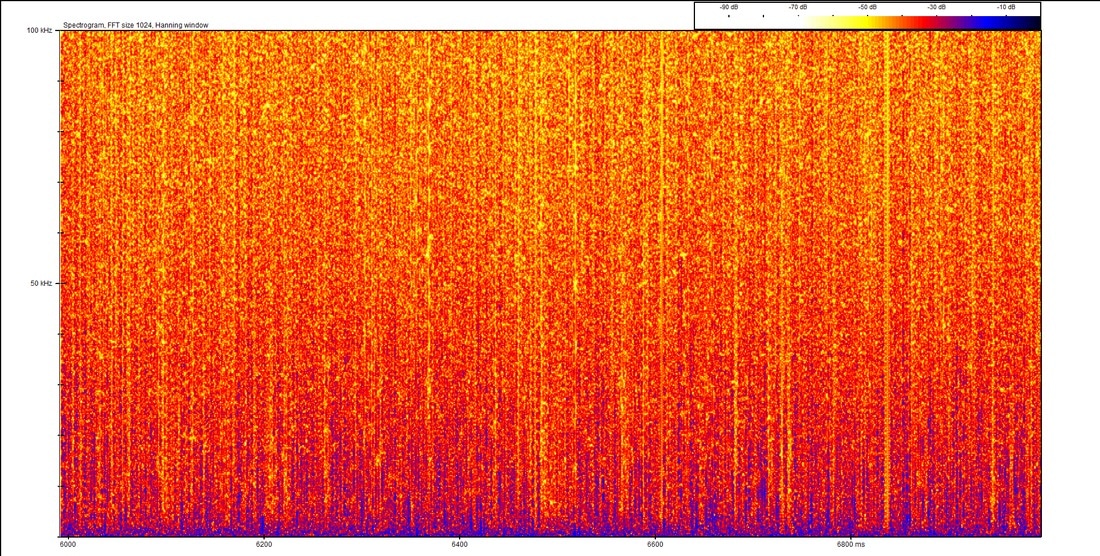
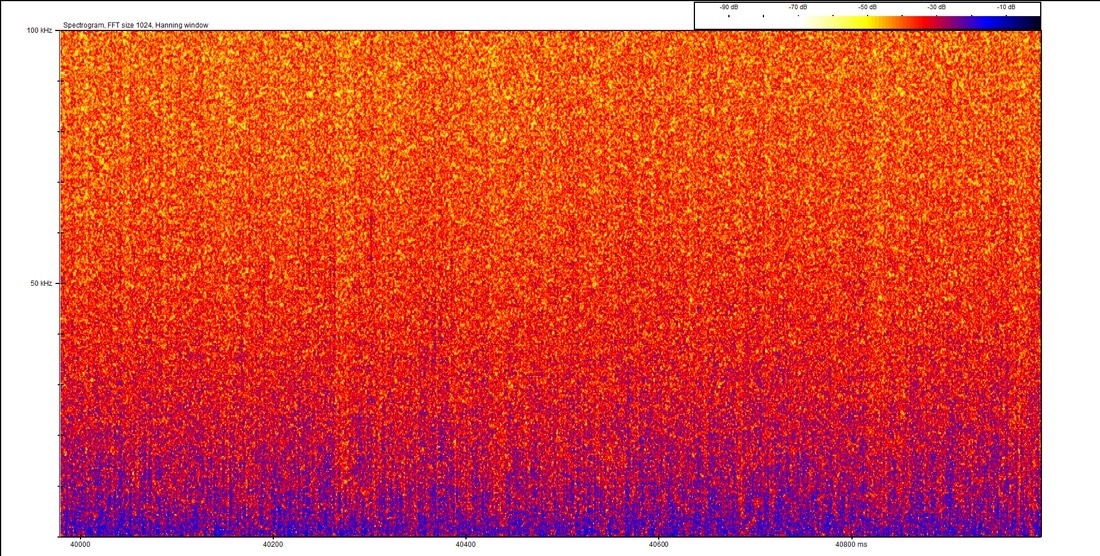
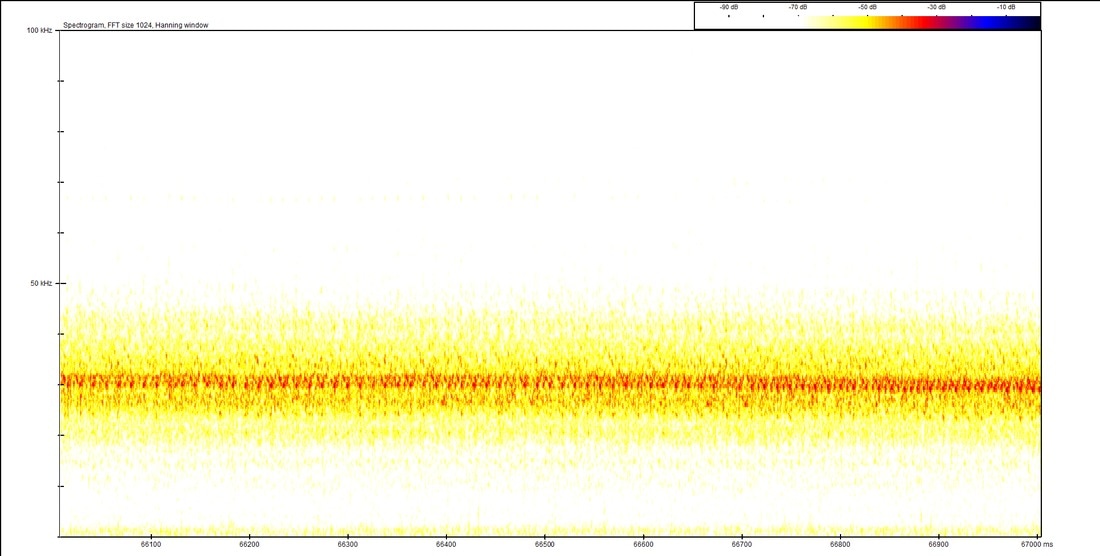
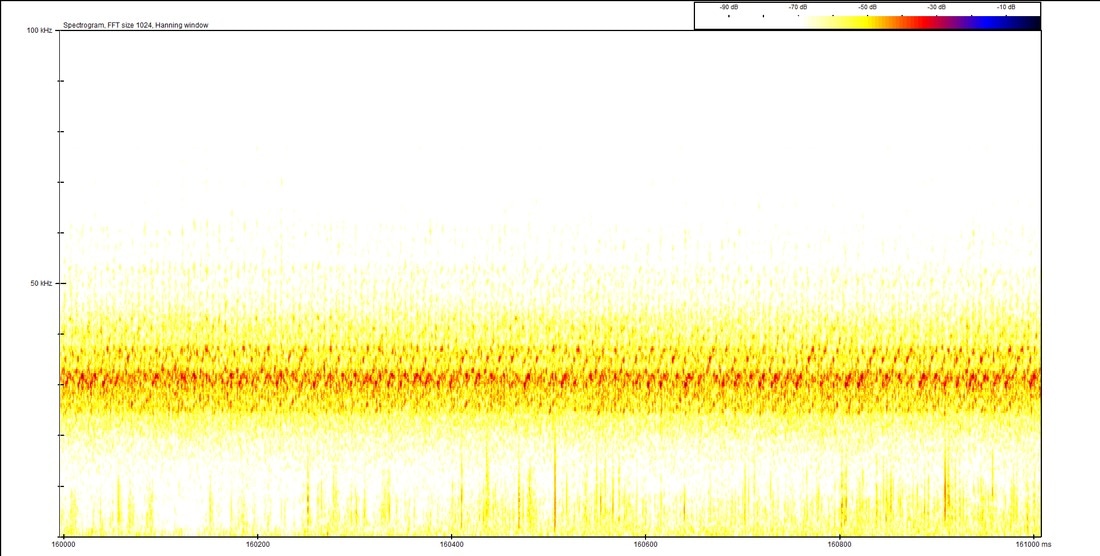
The Talon is one of our two current options for flying bat drones (the other being the quad, see here). It's a small plane which, like the quad, can carry a small bat detector and acoustically record bat calls. Have a look at the first post on it here for more info. One of the major issues we've faced with acoustic monitoring is noise from the propellers. We found that if the detector is not carefully positioned a certain distance from the propeller/s then the noise may drown out any bat calls. This is the latest post in a long line about noise, see the rest of them here. Last blog post about the Talon we looked at a number of different positions of the detector and discovered that about 15cm from the nose is the quietest position we tested. This led to us considering an extended option for the Talon - which is to say, having a stick pointing forwards off the front of the aircraft that the detector is attached to. And it looks like this:  Talon with extension #1  Talon with extension #2 We've secured a glass fibre tube from a fishing rod onto the front of the plane. This increases the distance between the detector and the propeller (the source of the noise). As it's ultrasound, it attenuates quickly so a small increase in distance can lead to a large drop in noise. Oddly, we found during the initial noise testing that the closer position (5cm from the nose) was actually quieter than the further position (15cm from the nose). We're not sure why and would hypothesise it's something to do with the airframe blocking the noise at 5cm. The next stage of testing performed was actually flying with this setup and seeing how our two detectors perform (the Peersonic and the AudioMoth). For interest, we tested the noise levels of the two detectors at two distances from the nose of the plane, 15cm and 50cm (the furthest possible distance). Here's how the noise testing turned out:
There is little difference between the two distances (although the 15cm does seem to be a bit quieter) but there is a distinct difference between the two detectors. The AudioMoth is particularly sensitive to moving air across the microphone resulting in extreme wind noise.
The noise levels on the Peersonic are significant but limited to a fairly narrow frequency which will still allow us to detect a number of bat species easily. It is also worth noting that the amount of noise varied through the flight, some louder and some quieter than the examples above. We're looking forward to getting into the field for some real world testing with this setup which we'll be doing next!
0 Comments
Leave a Reply. |
Categories
All
Archives
March 2017
|
 RSS Feed
RSS Feed
