|
We always knew there would be ups and downs during this project and a couple of weekends ago we certainly experienced some downs. It all started out well, having been in touch with the University of Oxford we were able to use our plane to do some testing in Wytham Woods. Wytham is a small village north west of Oxford and the woods there are a site of specific scientific interest (SSSI) and as such are in use for a large number of research projects by the University. Our plan was to fly a circuit on the inside of a number of tree lines and see if we can record anything. The motor shaft of the Mk2 plane unfortunately broke during it's last flight (see the landing in the video) so we decided to use the Mk1 plane (the Bix3) and attach a composite tube on the underside at the back of the plane to increase the distance from the propeller to the microphone.  Tom M setting up The first flight using the stabilisation and auto-leveling on the flight controller (FBWA mode) went well and we were happy to go ahead and load up the waypoints and set off on an autonomous mission. Below is what we actually flew although the auto section (in blue) doesn't show accurate altitude. During the auto section of the flight the plane was actually increasing in speed and losing altitude. You might be able to make out the little plane models that are on the flight lines - these show the attitude of the plane.  Telemetry from the Wytham crash Unfortunately, the plane impacted the ground at the end of the auto line. It was a pretty hard crash and I'm sorry to say we don't have any photos as we were quite disappointed at the time and didn't think of this. As a brief description, the battery was found approximately 30 feet away (it was placed externally on the plane for CG control); the motor had unattached from its housing and the propeller had chewed through the flap and a part of the left wing before impacting the ground and breaking in several places (the only part of the prop left on the motor was the hub); the wings had also unattached from each other and broken their connectors to the fuselage; the fuselage itself was cracked in several places. So, this wasn't exactly ideal and to compound this, we had no idea why the plane crashed which was probably the major concern. After discussion with the programmers of the flight control firmware we discovered that the plane didn't have enough elevator authority to correct its descent and needed the PID settings to be updated. After a fair bit of time spent gluing small bits of EPO together we think the plane should fly again! This all happened on our first night of a weekend of testing. We still had a couple of days to try and get something flying so we moved onto using the Mk2 plane and testing this with a new motor.  The Mk2 ready for a test flight! Using a set up of a 4S battery on the Mk2 we were able to fly a test fight of the plane, fully loaded with the bat detector and landing gear (to help protect the motor and prop).
However, our costly weekend wasn't about to stop there and we discovered that when we used the 3S battery the prop just wasn't able to generate enough thrust for level flight and we floated down for fairly gentle landings. Given that we're already stressing the motor more than we should by using a 4S battery it's just not the right set up to fly the weight that we want to. The Bix3 wing that we're using isn't designed to fly with the wing loading we're putting on it. As our power system also isn't able to generate enough thrust we've decided that the current design of the Mk2 is not suitable for our needs. What we're therefore decided is we need a new plane that can support the larger flying weights we require (circa 3 kg). So, we're in the process of designing and building a Mk3 plane which should fit our needs really well! Keep your eyes on the blog for some specs and 3D models of what we're looking to build!
0 Comments
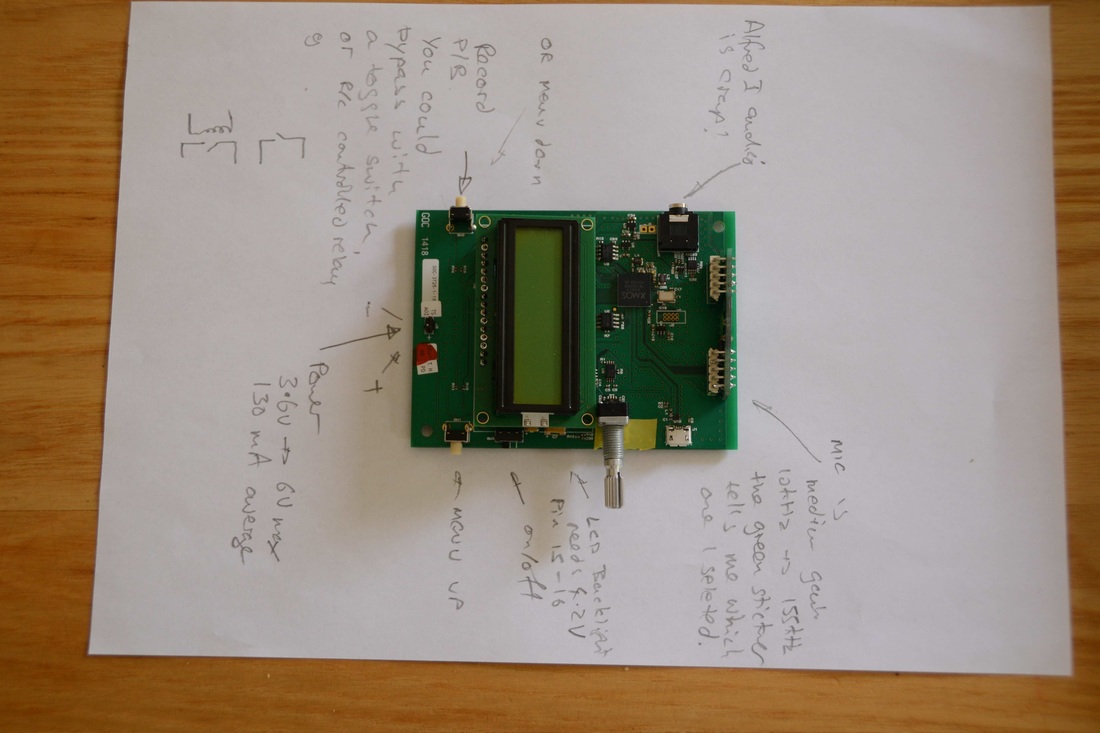
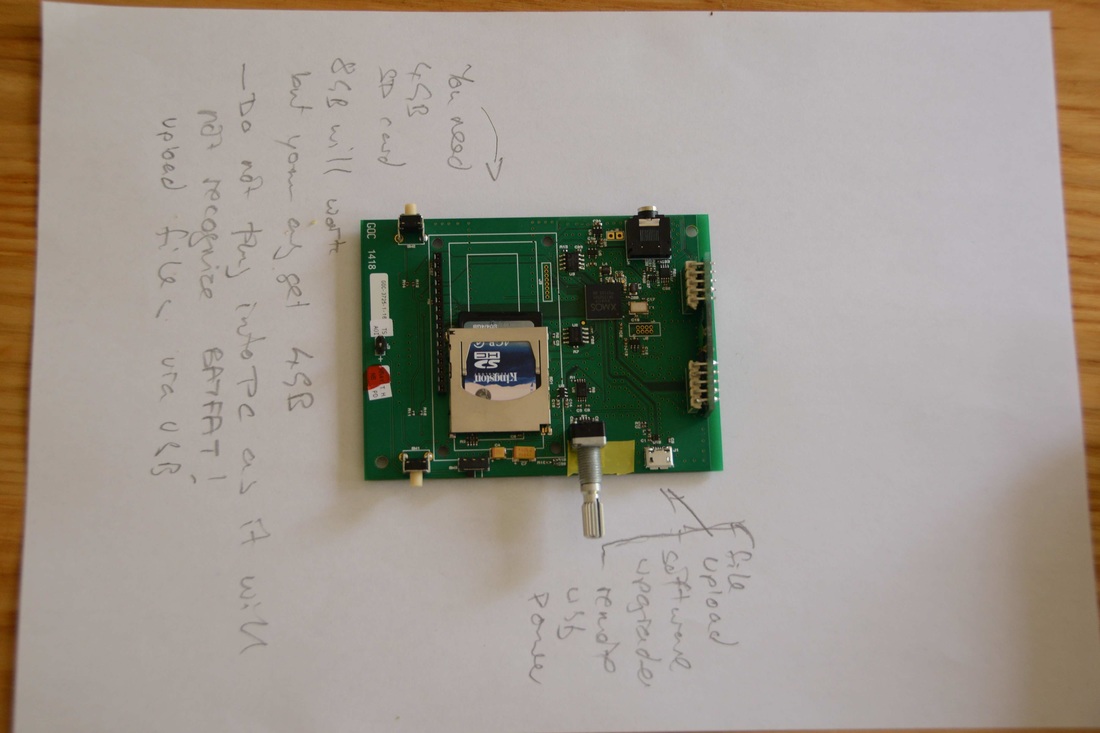
It's been a little while since the original Ultrasound - Part 1 post. At that stage we were looking into different ways to capture the ultrasound that the bats are creating and we mentioned we would be putting up a Part 2 to show which option we went with. We know that our bat detector must be as lightweight and small as possible and fortunately we were contacted a number of months ago by a chap called Peter from a company called Peersonic. Peter and his team are the designers and manufacturers of a fantastic detector called the RPA2. Check it out below:  Peersonic RPA 2 Bat Detector The functions that the RPA2 provide are unparalleled at this price point. Add into the equation that we can just use the circuit board, which lives inside the housing in the photo, and you have a very lightweight (circa 100g) and small system which suits us perfectly.
It's worth adding that Peter and his team at Peersonic have been fantastic and are still supporting us in our efforts. Peter has configured a RPA2 to work with a load of batteries we have lying around (1S LiPo) and built us a number of bespoke microphones which discriminate against lower frequencies in order to reduce the engine noise saturating the bat calls. We can't recommend Peersonic enough and if you'd like to check them out for yourself then we would highly recommend visiting their website at peersonic.co.uk. After an initial successful flight to prove the wings would stay on and the plane doesn't generally disintegrate in flight we've been able to fly the MkII again and are happy with the results.  We wanted to test two things:
Check out our video of the MkII in flight below... Ultrasonic interference It was our plan to test this in flight but unfortunately we weren't able to do this as in our last flight we snapped our motor shaft (which holds the propeller) from the plane which means we'll have to fix this before more flying (and add some landing gear!). Fortunately, we did take some readings on the ground at approximately 50% throttle (which keeps the plane level). Peter at Peersonic has kindly provided us with a new microphone to test which discriminates against 8kHz and below. We tested the new and standard mics at the full fuselage extension with the mic facing perpendicular to the fuselage. Original Microphone 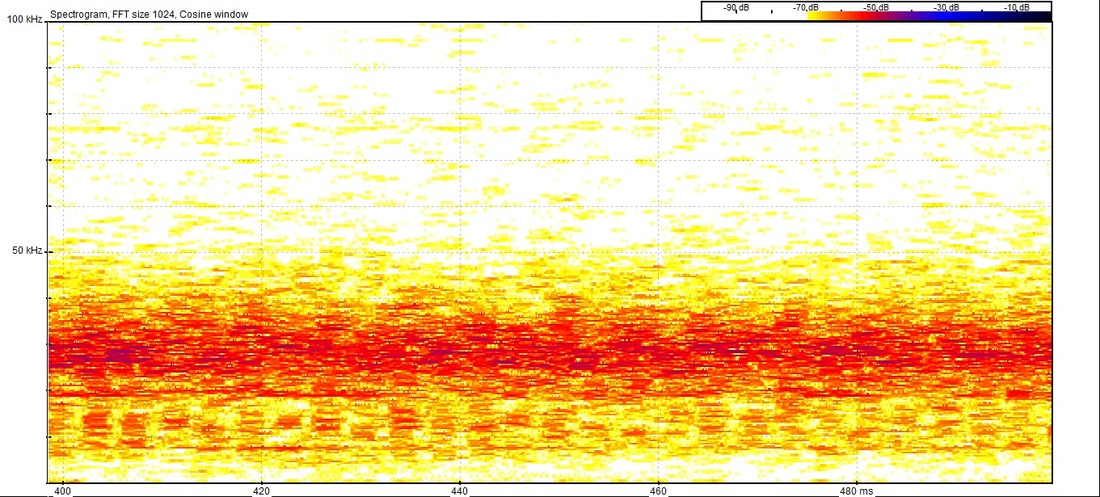 New Microphone 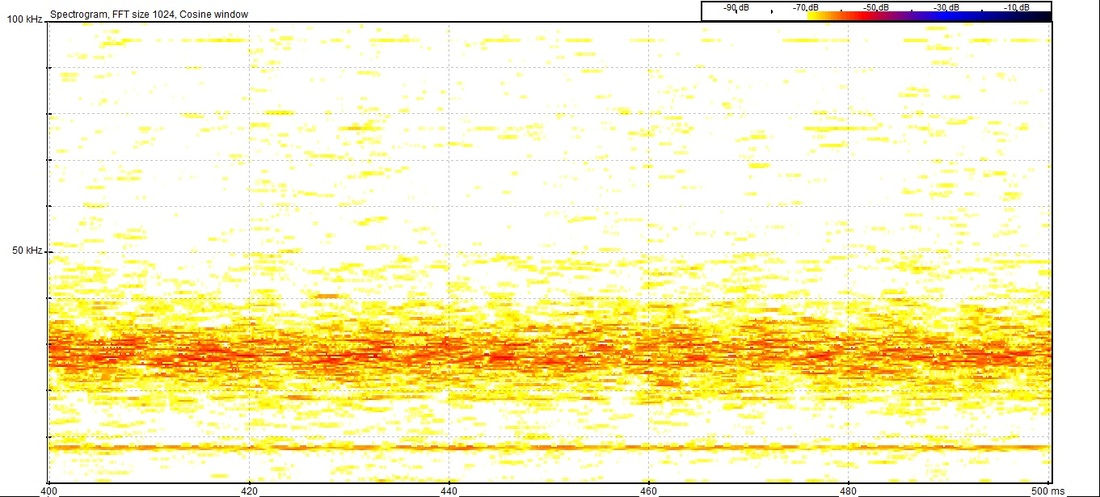 What do the results tell us? We can compare these two recordings with audio from the previous plane model. In this image we have the images above on the left and right respectively and a recording from the previous plane in the centre. Clearly the new plane design reduces the amount of noise by putting more distance between the microphone and propeller. 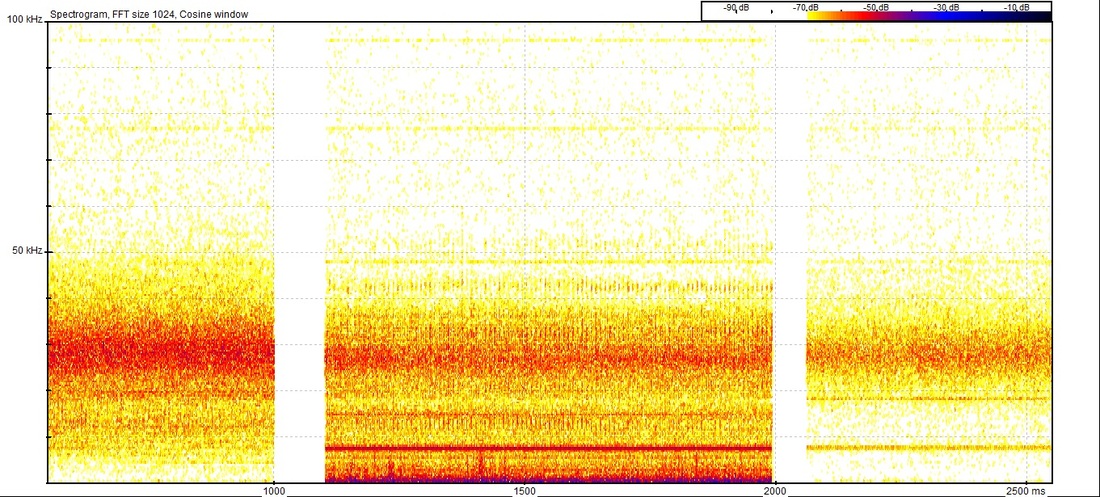 Hopefully with this new setup we'll have more chance of spotting bat calls in our sonograms. Real world testing to follow! In our efforts to replicate all of Batman's modes of transport in miniature we thought the Batboat would be a fairly easy hit... This was an idea which originally came about from discussing the possibility of monitoring bats over water using the BatUAV. We then thought, why not just use a boat? This idea was put aside as we were concentrating on the planes but later on Peter at Peersonic also had the idea independently and put it to us. The result is this fine vessel:  Canados 90 Oh wait, no, that's not the one... This looks more like it, the little one called Princess:  Princess So we've ended up with a boat from hobbyking called Princess. She's about 1m long and 30cm wide and can travel incredibly quickly (at about 35mph, which we don't need but it's always fun). There's quite a few challenges to overcome in using a boat autonomously:
We've plugged in a Pixhawk flight controller which can run Ardurover which controls ground vehicles such as a boat. The Batboat works just fine using this. Have a look at our video below for the initial runs. As for the ultrasonic interference we've tried out a new microphone from Peter which discriminates against 8kHz and below (to try and cut out some interference). Below are some sonograms of the results at the bow and the stern. Bow 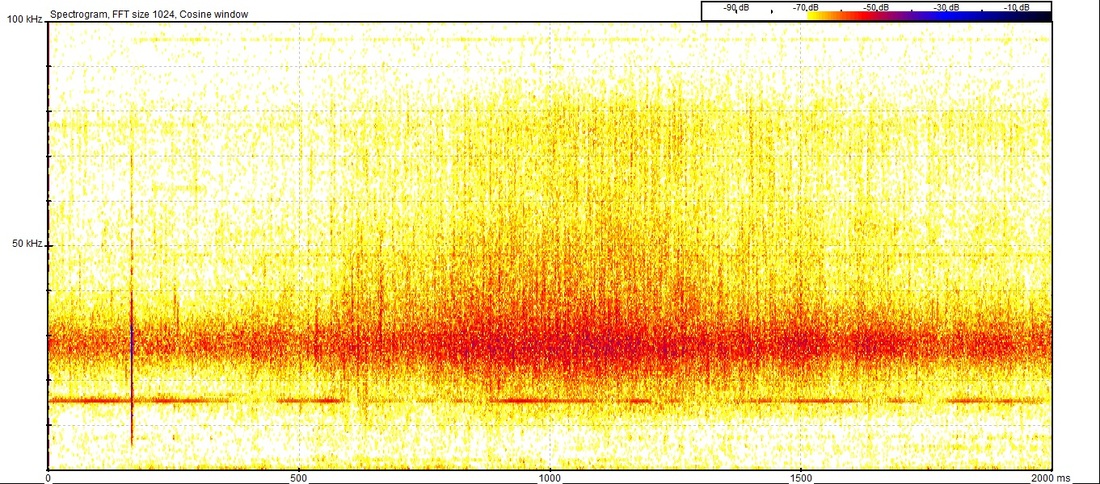 Stern 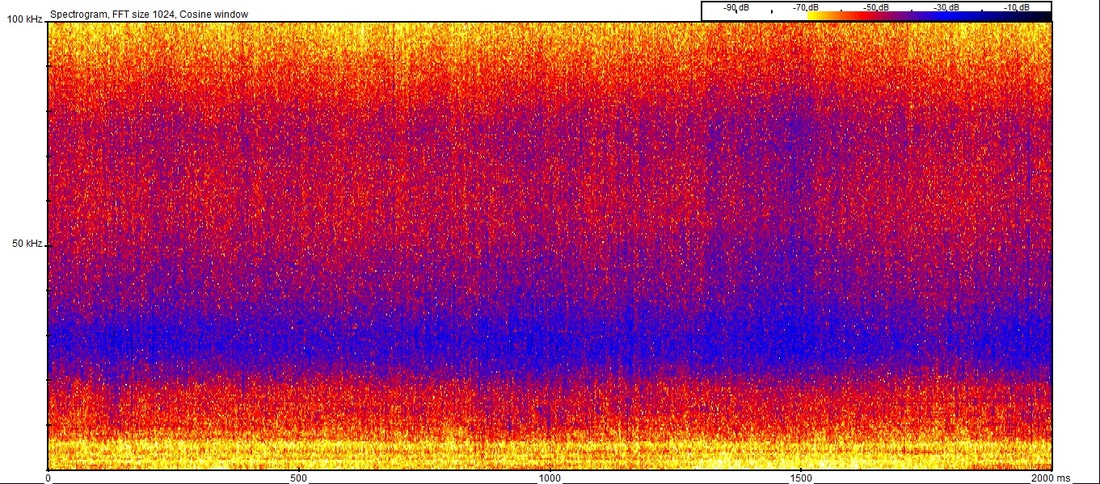
Obviously, the interference at the stern makes the microphone here essentially unusable. The bow is much better but we'll need to protect the microphone from any splashes. Hopefully we'll be able to turn off the motor and ensure there's practically zero interference whilst collecting data. Exactly how this is going to work in moving water is uncertain at the moment as we'll need to test position hold. We didn't manage to fit in any GPS testing (ie autonomous piloting) but watch this space for more testing soon! Although it's been a little quiet over winter we've had a new part of the project to work on: the Mark II plane!  Bat UAV Mk II We had a problem with our Bix 3 based Bat UAV as a lot of ultrasound interference was coming from the propeller of the plane. This was picked up because the microphone is about 70 cm from the propeller.
By moving the microphone further away (to approximately 2 m) from the propeller we expect to see a vast reduction in ultrasound noise originating from this source. The logical way to do this was to put the motor and propeller at the front or back of the plane and the microphone at the opposite end. Using an extending telescopic fishing pole as a fuselage we're added some wings and control surfaces and managed to do just that. The photo above is of the plane without the full length of fuselage. In this configuration it did well in it's first test flight and we're planning on getting more testing in soon. Next time, we'll be testing the flight at the full length of the fuselage and then with the detector attached. Watch this space!
After our success with the Peersonic detector working in-flight (see our blog post here) we decided to push on and get some actual field testing done! This will be the first time we've attempted to use the UAV to record actual BATS!
The first thing to do was identify an area in which is likely to have some bats flying around and that we can fly the UAV at. Fortunately, our flying site in Oxfordshire has a lovely line of trees with woods and hedges at both ends which look quite promising. During the day we set up a flight path which took us down the tree line, over a hedge at the end, looped round the wood then cut in towards the tree line again heading back towards us and past the wood at the end with a final turn taking us over a hedge and back to the starting point. The whole route took about 6 minutes 30 seconds to fly. Although the description is all very well and good a picture of the route might be more useful:
We flew this a number of times to ensure we weren't too close to the trees or in danger at any point. To do this we used a FPV (first person view) set up on the plane in order to assist in distance perception to trees. It turned out that this was fairly crucial as during the first run we were a little close to the trees. After some minor changes to the flight path we repeated the route and were happy with it. We decided on an altitude of 15 m to make sure we'd have more than enough clearance for any objects. Here's the plane's view of the flight path:
On to the night flying! With the route set, we were ready for the night flying with the detector. A bit of fiddling later and we'd set off on our first pass of the route. It's a strange feeling watching the lights of the plane sail off into the distance. It's great to see how stable the plane flies at night as well when the wind was a little lower. After two passes we decided to take a walk up to the woods at the start of the tree line to see if we could find any bats using our other detector. Happily we noticed one or two commuting down a hedge line that connected to the woods. A short re-route of the flight plan later and we had a flight running down the hedge line at an altitude of 8 m and 15 m horizontally from the hedge. Have we recorded a bat?! When looking through the sonogram, we noticed this: 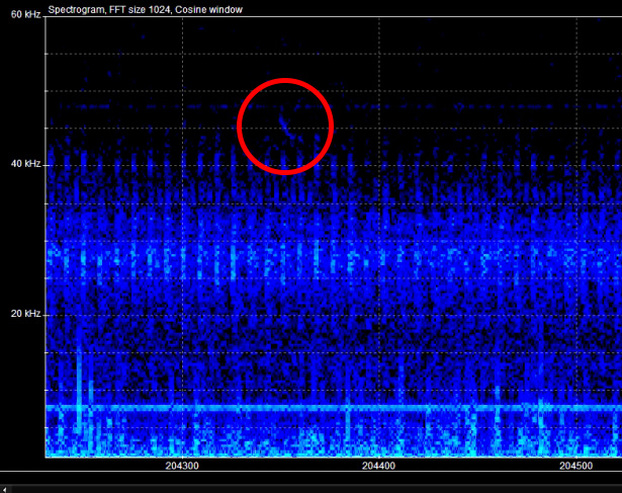
Is this our first recorded bat call?
Between 204300 and 204400 ms there's what looks like a 45 kHz bat call. The sound lasts for a duration of approx 7 ms and has a classic hockey stick appearance. It's also at bang on 45 kHz which ties in with a 45 pip.
There is however, a lot of ultrasonic interference from the motor/propeller and we want to be sure that this is a bat. HERE'S THE LINK TO THE RECORDING: If you have any experience we'd really appreciate your thoughts. The full .wav file is accessible via this link (right click - save as). Please feel free to download let us know what you think. As always, we'd like to acknowledge Peter at Peersonic.co.uk for his constant support and providing the recording equipment that has been so useful in progressing this project. Thanks, Tom & Tom Following on from our post here about our new detector from PeerSonic we went ahead and did some testing with this on the plane. We wanted to ascertain how the plane/detector performed for two criteria:
For a quick reminder, here's the set up we were using as modelled by Tom A:  Wing mounted detector set up The position of the detector on the wing tip is not ideal. It leaves the detector open to damage upon landings and adds additional weight at an extreme position relative to the centre of gravity which must be counterbalanced and gives rise to instability. For flight testing, we balanced the weight of the detector with a bag of sugar on the opposite wing. We're currently working with Peter at PeerSonic for a solution to this where we'll hopefully have the microphone separate from the detector and be able to mount the detector more centrally (relative to the centre of gravity for the plane). So, how did it fly? There was a noticeable instability in the roll element of the flight but nothing that the flight controller stabilisation and pilot input couldn't correct. This was more apparent when windy but the plane was definitely flyable in this configuration. For the ultrasound detection testing we flew two passes at roughly 10 m from the detector horizontally and at altitudes of approx 10 m and 20 m. Here are the sonograms from these passes: 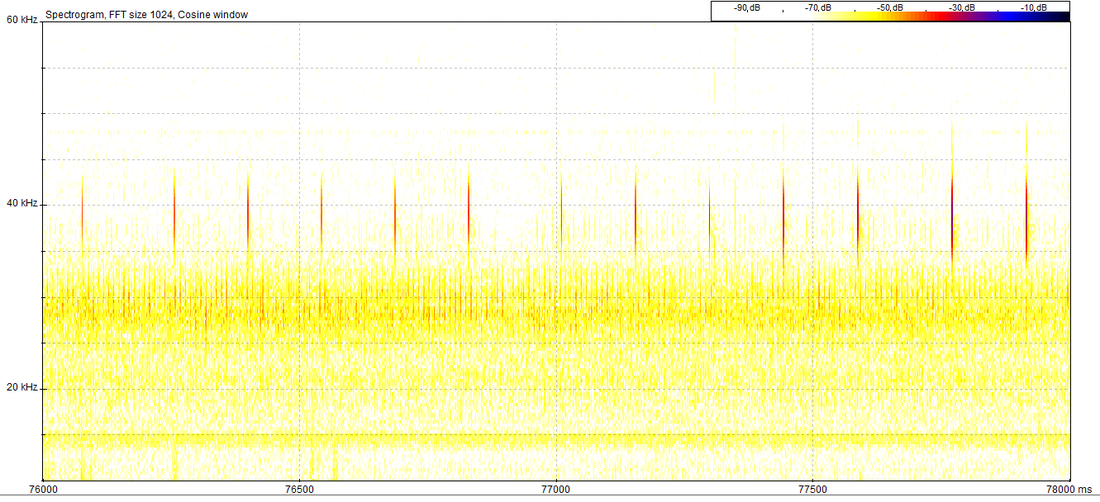 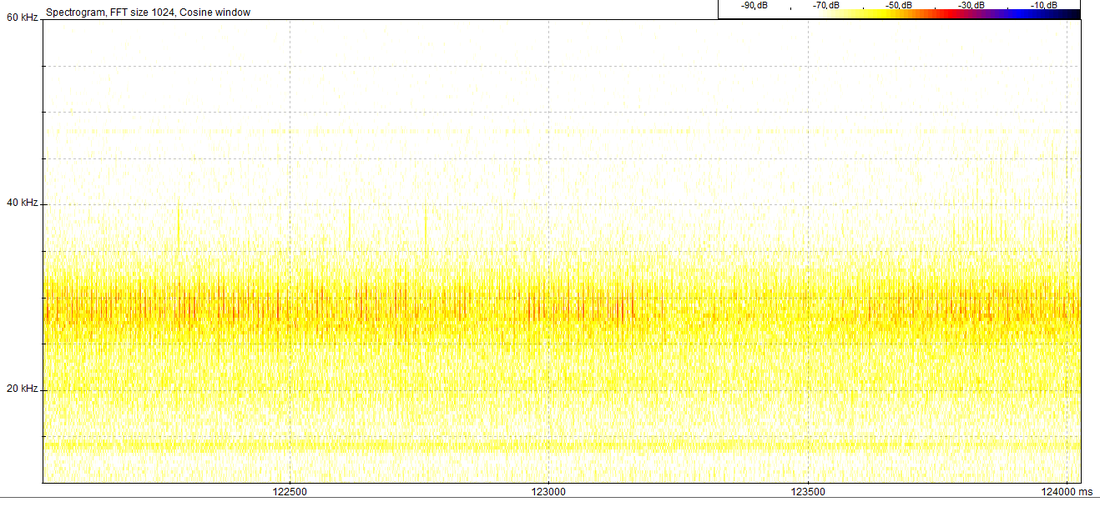 The ultrasound source is easily visible at 10 m, especially as it's a different frequency to the propeller interference. At 20 m we can see that the ultrasound source is hardly detectable.
Fortunately, we expect bats to be somewhat louder than our ultrasound source and hope to be able to detect at 20 m and perhaps even further. So, great news! We now have a working prototype for the Bat UAV! In the next post, we'll be doing some actual field testing and see if we can record any bats! In a bit of a testing lull, we thought it might a good idea to update you on the sort of kit that we're now using as this has changed somewhat from the first post about this here.
We've moved away from the quadcopter for a while now and have been testing a plane instead. This post is about the cost and suppliers of the stuff that we're using in case you would like to have a go at this yourself. So, let's take a look. The first thing to mention is that we're not going to be 'hearing' any bats without a decent detector. As mentioned in our last post about the new detector we've been using a prototype detector from peersonic.co.uk. It's a brilliant bit of kit being much lighter and smaller than anything we've seen on the market. Thanks as always go to Peter at PeerSonic for his help with this. We're also using a Bix3 from hobbyking (this link will take you to the Ready To Fly (RTF) version, we used the Plug aNd Fly (PNF) version but it doesn't seem to be on their website anymore). Something we haven't mentioned before is that we're also using a Spektrum DX8 transmitter. Have a look at our post here for why we went with a plane and this model in particular. Might be easier from this point to use bullet points for the rest of the stuff (all prices include VAT):
We also use program called Mission Planner to plan our routes on a laptop which we take into the field with us. This is the software that you connect to the Pixhawk with in order to plot waypoints and configure how the plane flies. Have a look here for the firmware we're using on the Pixhawk, it's all open source and free: http://plane.ardupilot.com/ So that just about covers everything that's required to put together something that we hope will have a decent chance of recording bats in flight. We do have future iterations planed design wise for the plane to further distance the motor/propeller and the detector so watch this space for future developments. Next time out in the field we'll be collecting some flight recordings with the detector and hopefully getting close to proof of concept. We've had some success recording an ultrasound source whilst in flight with our current detector set up that can be seen here. Unfortunately, this set up does not enable recording whilst the motor is in use and required the gliding flight that we tested this with (see here). Our ideal solution is a detector that can record whilst in normal level flight and we might just have been sent one such detector! Having posted our blog updates in the UK Bat Workers group on Facebook we had a reply to one of the posts from Peter at peersonic.co.uk. Along with a colleague, Peter has developed a very light and compact detector:
Peter very kindly offered to send us one of his prototypes and we were very happy to accept and give it a go. Having thought about the placement of the detector we decided that if we placed it at the end of the wing we might just be able to get away with detecting the bats over the noise of the motor. We came up with a way of attaching the detector to the plane (though at this point this hasn't been flight tested). The photos below show how we've attached the detector and put a polystyrene protector over it. With our new set up we wanted to test whether an ultrasound source can be detected over the noise from the motor 'in-flight' . To do this we held the plane steady approx 2 m from the ground, set the throttle to circa 40% (which should be roughly level flight) and turned on our ultrasound source at multiples of 2 m from the detector. The analysis of the data was then done in two parts. Firstly, Tom put together our usual graphs using R which produced the graphs below. It's worth noting that all the graphs use a negative decibel scale. 0 dB is the loudest sound detected and everything else is measured relative to this sound. 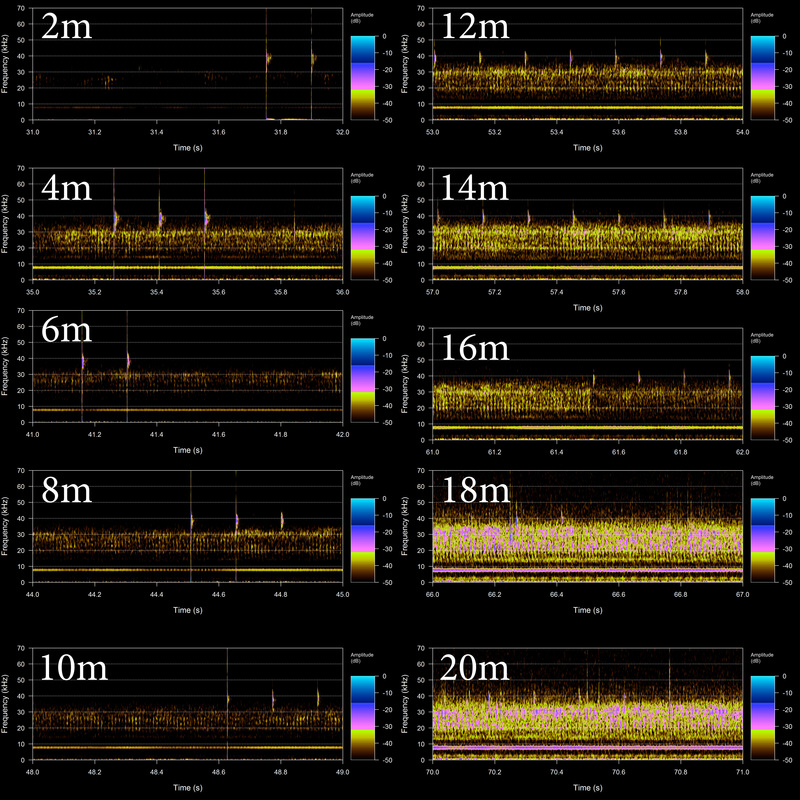 R analysed test data from various distances The blips that show up regularly at about 30-45 kHz are from the ultrasound source. The lower frequency noise between about 20-30 kHz is from the propeller and motor. Using this software it looks like we can detect the ultrasound source up to about 16m. However, when the data was run through BatSound we were able to extract a lot more useful information. Have a look at the graph below which shows the distance at 20m and you can clearly see the blips from the ultrasound source: 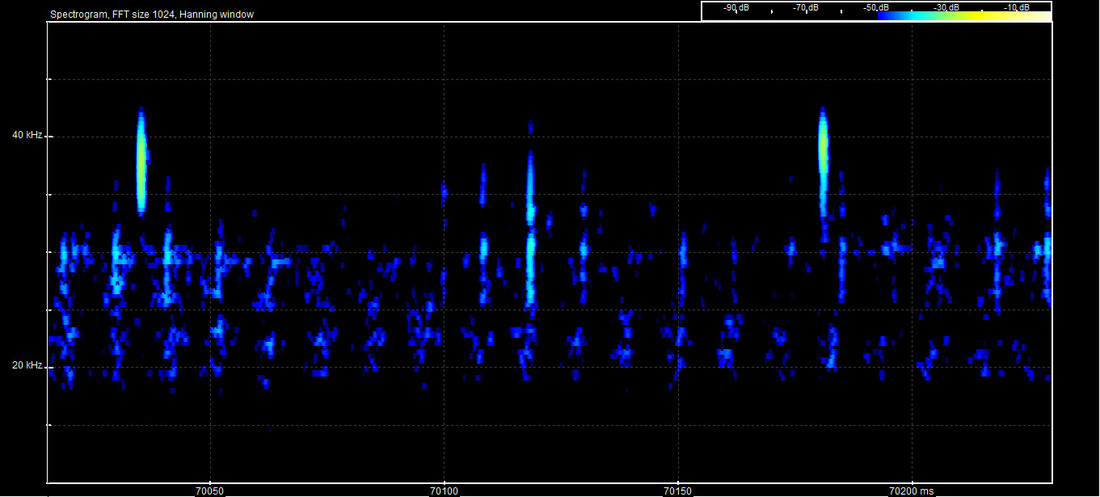 BatSound analysed test data from 20m with the ultrasound source So, we've got some good news: using the BatSound software we're able to detect up at 20 m and potentially a little further. We suspect that bats are going to be somewhat louder than our ultrasound source but would caution that ultrasound attenuates quickly. We'd be very happy if we could still detect at 30 m but we'll have to do some more testing to see whether this is the case.
As an interesting aside the graph above covers about 200 ms, the motor/propeller 'noise' (~20-30 kHz) is now split up into the actual rotations of the propeller. Working through this, we can tell the propeller is rotating at around 3000 rpm. The next test we'd like to perform is a level flight over the ultrasound source at varying heights so watch this space. If we can achieve a recording from this then we'll progress to attempting to record some real-life bats! We'd like to take this opportunity to give a big thanks to Peter at PeerSonic who kindly provided the prototype detector that made this all possible. Thank you! What do you need to be able to fly at night? Lights of course! Our first foray into night flying wasn't terribly successful, have a look at our post here. Fortunately, we've now gone for a bit more of a professional looking setup and all seems well.  In keeping with other aircraft we decided to fit red and green lights to the wings of our plane to designate port and starboard respectively. They're fitted to both the top and bottom of the wings so we can see them even if the plane is banking. The lights we used were strips of LEDs that are powered by a 12V battery. This is the same voltage as our flight battery but we're using a smaller additional battery to power the lights as we don't want them to reduce flight time. As a short note, the canopy above the Pixhawk flight controller is also lit up as the Pixhawk has a green light on it when it's all systems go and there's a GPS lock. We weren't sure how bright the lights would appear at distance so wanted to have a short auto-pilot test flight. Check out the video here: Despite the fact that the lights look quite small and not terribly bright in the video they're actually very bright and easy to see. To give you a reference the landing was lit by car headlights on full beam. We're pretty happy with how the lights have turned out and think we'll be able to manage night flying with out too much trouble. |
Categories
All
Archives
March 2017
|





 RSS Feed
RSS Feed
