 Tom A with our new plane - the X-UAV Talon Firstly, we'd like to give you a bit of background on why we're using the Talon at all: In mid-2016 we set about designing and building a plane which would fulfil our needs for the project, we called the new plane the Mk3 (see the post here). There were various goals we wanted to meet. We wanted to have a big wingspan so we can carry heavy batteries and fly for a long time and also increase the distance between the propeller and the detector in order to cut down on noise. During the build of the Mk3 plane we realised a couple of important points.
To further the aims of the project, it's more useful to find an off the shelf plane that people can pick up and put together themselves. That's where the X-UAV Talon comes in. X-UAV is actually a Chinese company that produces a number of UAV platforms, the Talon being one of these. The Talon itself is actually based on a Lockheed Martin design of a UAV called a Desert Hawk. The photo below shows the original Desert Hawk, quite a similar design to the Talon:  Lockhead Martin Desert Hawk I The Desert Hawk design was put together by Lockheed's famous Skunk Works division which is responsible for advanced projects and prototyping. They're some of the best aircraft designers in the world and have a back catalogue to prove it (U2, Blackbird, F-117 stealth fighter for example all started life at Skunk Works). There's also a wikipedia page about the Desert Hawk if you're interested. Given the history of the designers, we expected a good airframe. As a short aside, this is a nice re-purposing of the word drone from a military context into a more environmental/ecology context or to put it another way into a more humanitarian context. Drones can be viewed as tools like any other and although the initial use of these tools was often by the military, it's increasingly common to see commercial and hobby drones which may help to re-purpose the word itself. Back to the Talon and happily, it does fly brilliantly and we're really pleased with its characteristics in the air. The airframe is a very smooth flyer and we're looking forward to investigating potential placements of the ultrasound recorder so we can get out for some field testing. Below we've shown a couple of images taken from the telemetry on board showing the flight path. The one on the left is the maiden flight and the one on the right shows all the test flights performed:
For interest here's a video demonstrating some of the test flying: If you're interested in potentially building your own bat sensing drone and the more technical aspects of the project then we're going to cover the components of the Talon and a comparison between the Talon and the Mk3 next. If you're not interested in the more technical aspects of the project below then know that the Talon files well and meets the needs of the project so we'll be using it a lot more in the future! The Talon is essentially meant to act as an easy to build replacement for the Mk3 plane. As such, it would be useful to provide a quick comparison between the two:
The most useful figures we're looking at are the wing loading and the cubic wing loading as because the two aircraft are similar in size these can be compared. The numbers are close enough to tell us that the two planes will have similar stall, cruise and landing speeds (though a variety of other factors also come into play here). In practice this has also turned out to be the case. A lower wing loading means that the wing needs to generate less lift for the plane to stay in the air and hence it can fly slower (which is good for slow landing speeds and cruise speeds). There are wing extensions available for the Talon though they have been difficult to find. We've luckily just managed to find some and they're 'winging' their way (it's the best I could come up with at short notice) over here from China as I type this. They'll increase the wing area and reduce the loading to around 16.6 oz ft^-2 which will aid slower flight. Finally, if you want to be able to reproduce what we've done then it would be useful to cover all of the bits and pieces that have gone into the Talon. Have a look at the table below for the full specification:
* We bought the Pixhawk 1 quite some time ago (in 2014) from 3DR. Since then they have stopped selling flight controllers and have moved onto closed systems. There are a couple of options available. A group of people who worked on the original Pixhawk 1 have launched a successor, called the Pixhawk 2.1. This would be the preferred option as it's a better flight controller. The second option is that because the Pixhawk 1 was open source there are a variety of clones which perform in exactly the same way. This would be less expensive and provide the necessary functionality. It's worth having a google for which are the best clones if you decide to go down this route.
*2 The original power module (this is the part which connects the main battery to power the Pixhawk) only accepts up to 4S batteries. As we're using 6S we needed a new one which could accommodate the higher voltage. If you do decide that you'd like to go ahead and build a bat drone then do get in touch with us as we'd be happy to offer any advice. Our email is on the contact us page. Next, we'll be posting about some acoustic testing with the Talon, watch this space!
1 Comment
We were lucky enough to be invited to the Natural History Museum in London for their 'Science Uncovered' event. We joined hundreds of other scientists who had stalls all around the museum sharing their science.  As well as a couple of drones we also had a flight simulator on a large TV screen so people could have a go at flying a remote control plane using one of our transmitters. This was pretty popular and demonstrated that age is no predictor of ability to fly!  On our stand we also had a compilation video of all the footage we have collected over the project, some bat calls on an iPad, and a bat detector for people to play with. We took out newest plane, the talon, and our quad to show visitors. The quad was linked up to a laptop to show all the telemetry readings that are recorded in real time, and the plane was great for showing how light weight the air frames are, even little kids were able to hold it above their head with ease.  We were chatting to visitors pretty much continually for 6 hours so we were both pretty tired afterwards. If we are invited back we might have to employ some helpers!
There was a little time between Christmas and New Year when it was possible to nip out for a test flight of a new trainer plane. The trainer is exactly as it sounds: a plane to aid the training of new pilots. This would potentially help both of us (Tom M and Tom A) to be able to fly and aid the training of others who wanted to invest in their very own bat drones (we're not aiming to sell anything but we can help people with building aircraft or provide advice on what to buy). It's worth pointing out that we would always recommend that people start out with a simulator on a computer and then move onto a trainer plane. The first plane that we flew, the Bix 3, is actually a trainer. Check out one of our first blog posts here to see more about it. There was a little spare foamboard left over after the build of the Mark 3 plane so we thought it would be useful to build a trainer aircraft with it. The maiden flight of the plane was successful in that the plane landed in one piece. However, the weight of the plane is quite high relative to the wing area leading to a high wing loading and therefore relatively high cruise speed. This doesn't make for a perfect trainer and a lighter plane would be more desirable (either bought or built). The design used was one from experimental airlines on Youtube; have a look at their channel here if you're interested. It was discovered recently that the foam we're using is circa 2.5x heavier than the foam experimental airlines uses which has lead to heavier than expected aircraft. There's not many photos of the completed plane unfortunately so here's one of the better ones:  And, getting to the bit where it all went wrong, take a look at the video below: So at least we know what the issue was and have learnt a lesson or two.
For a trainer we'll probably fix up one of the Bix 3's that we've been using as these are light and fly well. When building further aircraft we'll use lighter foamboard. There's some available on Hobby King which is even lighter than the experimental airlines foamboard so this seems like a good option. And finally, we'll not fly too far away from our transmitter without an autopilot failsafe in place! The flight controller for this plane doesn't have the ability to return to launch so this was not an option in this case. Next up, we'll be test flying a new airframe - the Talon! Watch this space.... The big event of the bat calendar is the Bat Conservation Trust's annual conference. We had always made it an ambition of ours to attend so we were excited to be accepted to talk this year. We gave an overview of our project, from our initial idea, through up and downs, to our first recordings from the Bat-Plane and Bat-Boat.  Our talk went down well and can be viewed online, over here. We also heard some other great talks including some innovative uses of technology. The future looks bright for bat work in the UK.  We got to show off our drones, old and new. some with a lot more duct tape on than others! We also had some great questions from the audience and great discussions with other attendees which we hope to build on in the next field season. Last time we picked up the Batboat we put in an autopilot and managed an autonomous run (check out the last blog post here for more info). We now wanted to move on to fine tuning the autopilot and some real world field testing. Tom A had recently performed a survey along a transect route that included a decent stretch of the River Thames in Oxfordshire. A number of species (Daubenton's Pipistrelles and Noctules) were picked up during the survey so we knew that this was a good stretch of river to test the Batboat on. What are we looking to test?
To this end we headed down to the river during the day to assess the autonomous navigation of the boat along the river. 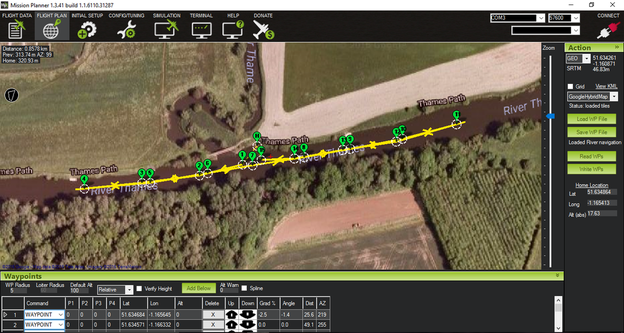 Set up of the testing route on Mission Planner We set a waypoint route for the boat that headed up river, turned around, then came back down river past the starting point and then another turn and back to us. All was well on the up river stretch and we were able to walk along and see the boat from the river bank. At the turning point, the boat struggled to make a small enough turning circle and ran into the near bank. Fortunately, we did plan for this and had brought some swimming things so we could fetch the boat if necessary. A short cold plunge later and we were able to run another test.  Impromptu light hood for setting up routes on the laptop We're not experts on the navigational algorithms that the code contains (on the autopilot) and although we went through a number of variations with settings we only managed to make a couple of successful runs up and down the river. We think that a directional propulsion system would have more luck in steering the boat successfully; this is something we'll investigate in the future. Despite this, we knew that the boat could at least navigate either an up river section or down river section successfully so we decided to head back out during the evening for a field test. Lights were fitted (red for port, green for starboard) and we had no issues seeing the boat in the dark. First hurdle overcome.  Navigation lights We'd set up a long run (circa 400m) up the river and then back to us so we could follow the boat from the river bank. We really hoped that the boat would make the turn on this one as it was now dark and neither of us fancied another trip into the water to fish out the boat! With bat detectors in hand beeping away, we knew that we had a good chance of success so launched the boat and flipped the switch for the autonomous navigation to take over. Leaving all of our other equipment by the river bank we excitedly walked a parallel path to the boat and kept our fingers crossed that all was going to be well. A few minutes later and we'd reached the turning point (fingers now extra crossed). The boat started to make the turn away from us and toward the far bank. All was going well until we realised that there were some low trees with branches in the water which were lit up by the lights and the boat was now powering into them. We flipped the autopilot off and back to manual control but it was no good, we'd managed to get the boat stuck on the far side of the river. Somewhat dismayed at what we knew was coming up we trudged the 400m back to our equipment and picked up the wetsuit. The bank was fairly steep opposite the boat so it took a little hanging onto trees and squelching through river mud to reach some quite chilly open water. With the head torch on low to avoid too many insects being attracted I swam over and pulled the boat from the branches. Boat successfully recovered? Check. Swam in the Thames at night? Check. The question that seems to come to mind is: was it worth it? To answer that, have a look at the selection of recordings from the evening run below. In relation to our aims for this experiment:
The autonomous navigation of the Batboat - is it able to successfully navigate a loop on the river? Not reliably. We've seen that it is possible though requires refinement of the navigational algorithms that control the turn or a different physical set up of the boat. Peersonic have kindly provided us with a new microphone which has a filter on that suppresses frequencies below about 20 kHz. We're hoping that this means we have a better signal to noise ratio given that the motor/prop puts out noise at (generally) below 20 kHz. Yes. It appears that the new microphone is suppressing the noise from the motor and as a result there is an improved signal to noise ratio for the bat calls. Successful use of the Batboat at night - are the lights ok? Can we see the boat?Yes. No problem seeing the boat from the bank or at approximately 100m away. Recordings of bats - can we get any, are they useful (ie good signal to noise etc)? Yes. Very happy with the signal to noise ratio of the calls, there's is noise showing in the spectrograms and importantly it doesn't interfere with the calls which are very clear. Worth noting as well that we didn't see any change in the bats flights when the boat was near them. They appear to ignore it. In conclusion, we're happy with the results from this set of testing. From a search we can't find any instance of anyone attempting to record bats from an autonomous boat so we're claiming a world first on this one. We'll be working on this system to improve reliability and then move onto further field testing. Keep your eyes on the blog for more updates! Following on from our less than successful weekend of testing (check out the blog post here if you haven't seen it already) we decided to build a better plane. In this post we're going to cover a bit about what we wanted the air frame to achieve along with a description of how the major bits were built and finally the maiden flight. This is partially to keep you up to date with what we've been up to and partially to pass on the information required to reproduce what we've made. Design parameters / goals:
With the above parameters in mind a rough 3D model was designed: 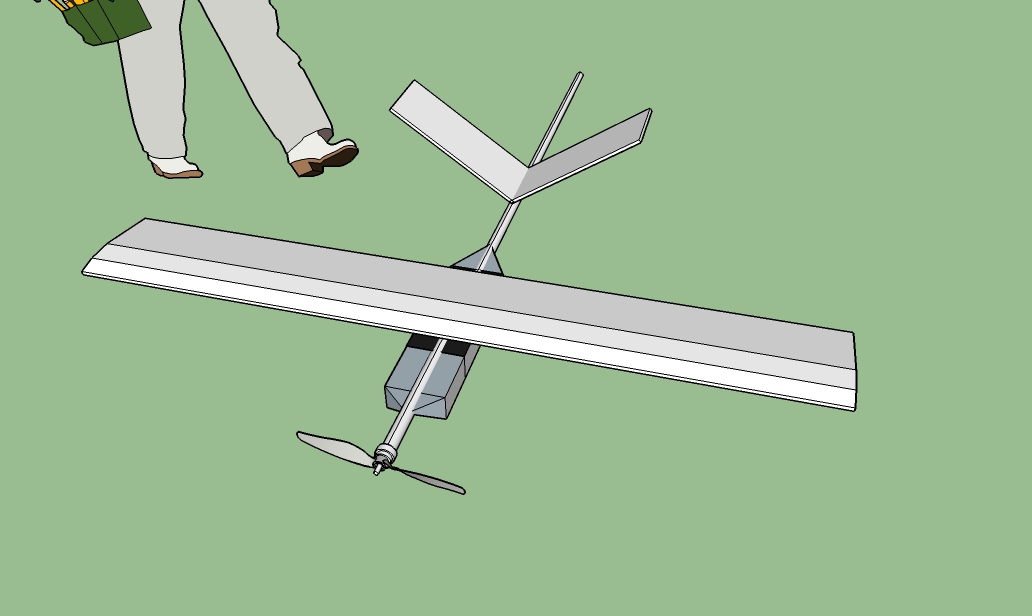 The model shown above has a wingspan of 2m and a chord (the distance from the leading edge to the trailing edge of the wing) of 30cm which provides a wing area of 60dm2 (6000cm2). Generally, the larger the wing, the more lift it can produce which for our use is a good thing. The 'fuselage' or at least the bit that joins all the pieces together is made of a carbon/glass composite fishing rod as seen in the Mk2 design. It's collapsible which was a necessity of the design as it wouldn't fit in the car otherwise! The weight was estimated to be around 2.5kg and this was factored into the power system choice. Power system In order to achieve a long flight time the current draw from the battery would need to be low so a relatively high voltage system was chosen. The battery is a 6S LiPo (though Li-ion would also be suitable), the motor is a Tiger MN4014 400KV and the prop is an aeronaut 15x6 folding. It's estimated that this setup will produce circa 3-3.5kg of thrust (greater than a 1:1 thrust to weight ratio) and cruise at about a 5A draw. If we had a 5000 mAh battery and used up all the juice (which you shouldn't do as for maximum longevity and battery health you should always use only up to 80% of the capacity) then this set up would theoretically fly for 1 hour. The motor was supplied at reduced cost by Duncan at heliguy.com and a big thanks goes out for that. The prop and yolk (along with ESC and a few other bits and pieces) were supplied by Gareth at Gliders.uk.com at a reduced cost so a big thank you to him as well. In case you were wondering, the prop is folding so we can protect it upon landing. Previously we had a number of issues in breaking props and motor shafts so hopefully this will cut down on those! Here's a quick look at the motor and folding prop:  Bat plane Mk3 MN4014 motor and folding 15x6 propeller After a discussion with a local flying club (special thanks to Steve and all at Ham FC) it was decided that it would be better to place the motor at the rear of the aircraft in order to put the microphone into clean air and away from the prop wash. Building technique and materials The main considerations here were cost and ease of use in building. Given that we have limited experience of building planes the construction techniques needed to be simple and effective. Fortunately there's a lot of information about simple building techniques online and especially on YouTube. There's a great channel called experimental airlines which provided most of the building techniques used in the construction. Specifically it's worth checking out the videos for the Armin wing and carbon-fibre tail booms. Wing construction The material for the wing and tail surfaces is Kapa foamboard which is an expanded foam sandwiched between cardboard. We've been brilliantly supported by modelshop.co.uk who have supplied all the foam and a fair few other bits required for the build. Special mention to Andy there who's been incredible. The wing stiffness is partially provided by a 2m carbon fibre spar which runs the length of the wing and is held in place using foamboard 'formers' which help create the aerofoil shape of the wing. All the carbon fibre used the build was supplied at a reduced cost by easycomposites.co.uk so a big thank you to them. Below is a photo of the wing mid-build showing the foamboard formers in place. The carbon tube is in the groove between the foamboard. As a weight saving technique holes were drilled in the foamboard which can be seen in the photo.  Bat plane Mk3 wing mid- construction After a bit of gluing, sanding and taping, the result was a wing that measured 2m x 30cm along with a further 5.5cm of control surfaces. Both ailerons and flaps were made out of the foam and covered in packing tape to waterproof them and provide some structural strength. The wing has a flat bottomed aerofoil section with a rough 15% height to chord ratio which should provide relatively high lift. Here's the completed wing laying on top of the fuselage and v-tail section:  Bat plane Mk3 - completed wing The next matter to attend to was how to attach the wing to the fuselage. The answer to this was handily provided by the Experimental Airlines YouTube channel in their carbon tail boom video. This technique uses a sheet of carbon fibre/glass fibre/metal attached to the boom (fuselage) and elastic bands to hold the wing in place. Although the elastic bands provide an excellent form of damage limitation in the event of a crash (see the video linked above); we weren't 100% convinced that they alone would be sufficient to attach the wing to the carbon sheet. So, we used a couple of carbon strips and nylon nuts and bolts to attach the wing to the sheet in addition to the elastic bands. The carbon we used was actually a carbon/glass composite (as it is about half the cost of a pure carbon sheet). It comes with one side not covered in pre-cured resin so as part of the build we covered this in resin to ensure we weren't going to pick up any splinters in use. Here's a photo of the drying carbon: 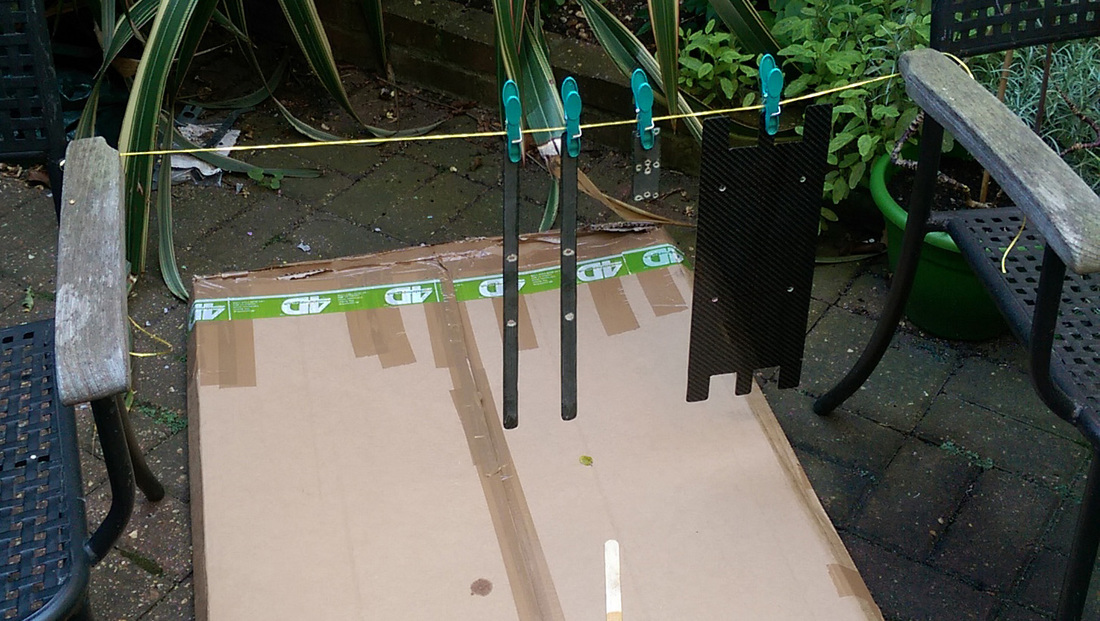 Carbon fibre sheets with resin applied drying outside And below is the intended structure of how it'll look without the wings in situ. Note that the two parallel strips will be inside the wings. 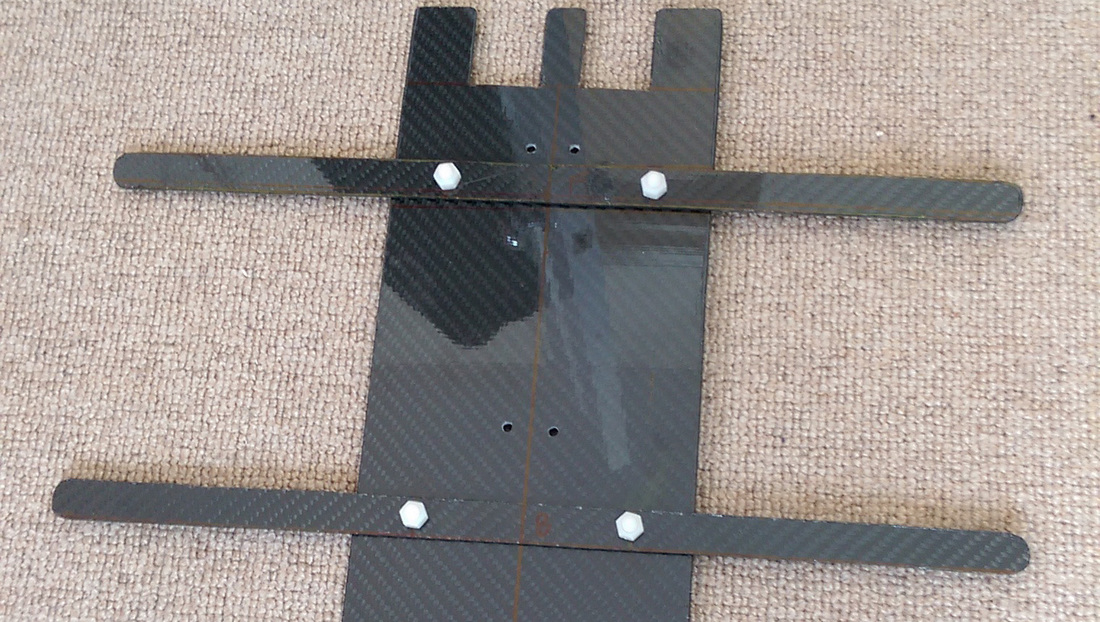 Completed wing attachment assembly Finally, below is how the wing looks with the wing attachment assembly in place. Hopefully it makes sense for how the elastic bands fit over the tabs on the large carbon sheet which is attached to the fuselage.  Wing and wing attachment assembly in place So that's one major part of the construction completed. Once the v-tail was constructed, the large carbon sheet that the wing sits on was then glued to the fuselage along with a couple of small diameter (approx 5mm) carbon tubes to hold it in place and finally secured with a couple of cable ties. V-tail construction Prior to any of the building actually taking place a few numbers were worked out to ensure the plane would have a fair chance of firstly flying and secondly being able to be controlled in the air. Part of this is working out the size of the tail and a couple of numbers called the horizontal and vertical tail volume coefficients. These are just formulas which you plug your numbers into and they tell you whether the tail will be able to provide the stability that its meant to. To calculate the v-tail area and angle we used Dr Mark Drela's formulas here. He's a professor in the Department of Aeronautics and Astronautics at MIT so seems to be a pretty reliable source! We also used a value of 20% of the wing area for the 'horizontal' stabiliser and 10% of the wing area for the vertical stabiliser. The horizontal and vertical tail volume coefficients (Vh and Vv) were calculated as 0.41 and 0.031 which are satisfactory but not brilliant. There is a restriction on the placement of the v-tail as the fuselage telescopes in the middle so the tail and wings can only be placed on one half of the fuselage (over a distance of about 1m). If we could have used a non-telescoping tube for the fuselage then we could have distanced the wing and tail more which would have resulted in a better Vh and Vv. We'd worked out that our v-tail would therefore be 20cm x 45cm and have an angle of 110 degrees between the tails (ie 35 degrees from horizontal each). Now all we needed was a method to attach the tail to the fuselage. Quite a few ideas were brainstormed and although some would have provided more strength than the one that was chosen it's a trade off between weight and strength so weight was prioritised. A number of ideas involved carbon tubes going through the fuselage which was also not practical in our case as this would have meant a fuselage which could not telescope. The idea we settled on was to attach two carbon strips to the fuselage at the required angle and have a single section of foam forming the two tails which would be glued to the bottom of the strips and the fuselage. Another layer of foam was then placed over the strips and tails and glued in place to provide further security. Here's the carbon strips being glued in place:  V-tail attachment There's no close-up images of the tail currently but what we do have is an image of a previous attempt to glue the tail in place that wasn't successful. It gives you an idea of how the tail attached to the fuselage and carbon strips, or rather in this case, how it didn't.  V-tail attachment failure The issue was that the tail is covered in packing tape which helps protect it from the elements (well, just water really) and also provides a bit of structural strength. The glue used on the carbon strips didn't adhere well to the tape and when it was placed down quite hard it simply popped off. This does give an idea on how the tail is attached to the fuselage though. The issue was fixed by removing the packing tape and cardboard underneath so that the carbon strips attach directly to the foam in the foamboard which provides a much stronger adhesion. The control servos for the v-tail ruddervators (a mixture of elevator and rudder) were initially placed on the fuselage just behind the wing and long control rods and carbon tube guides used. After experimenting with this it was decided that the control rods were flexing too much and this would lead to poor modulation of the control of the surfaces. The servos were then moved to a direct placement on the tails and a much shorter control rod used resulting in a satisfactory setup. To pod or not to pod In the initial design shown in the 3D model at the top of the page there's a pod attached to the bottom of the fuselage. This was intended to hold all of the electronics equipment (including the detector) and the battery and also to act as a form of landing skid. The final design of the plane doesn't incorporate this pod as it was realised that the majority of the electronics could fit within the free space of the wing with the battery and detector then being external. This was worked out as during the build the bits and pieces being used and constructed were weighed and it turns out that foamboard is actually quite heavy! The initial thoughts on the weight were that it would not be over 2.5kg but this turned out to be unrealistic when using foamboard due to its weight. Given that the battery alone weights 960g perhaps 2.5kg was an unrealistic goal for a plane of this size. The final weight of the plane is circa 3.7kg which did lead to some concerns over whether it would actually get in the air! The lack of a pod also lead to one other concern: Landing gear The plane doesn't have any landing gear to speak of and instead relies on skids and a slow landing speed. The skids are there to protect the wing attachment assembly and the v-tail attachment assembly and motor. They are constructed of a high density foam (not sure what its real name is but in the RC world it's called blue foam). Here's a couple of images taken during the construction of the skids:
Essentially the foam was cut with a saw and then filed and sanded into a vague aerodynamic shape. It was then glued with Gorilla glue to the fuselage:  Fuselage with landing skids attached Although the skids would provide some protection for the wing and tail attachment assemblies it's very likely that the wing will strike the ground upon landing. This isn't an ideal solution but the foamboard is flexible and should be able to cope with this. It's also easily replaceable should it tear or break. The main factor to limit any potential damage during landings is to have a slow ground speed. Also worth noting in the above image is the wing in the background and the small pieces of blue foam used to protect the servo arms and control rods for the wing control surfaces. The servos are buried in the wing with only the arms sticking out so these are the only bits which require any protection. The brains of the plane - the flight controller The final piece of the plane is the bit that's actually going to do most of the flying for us, the flight controller. We're sticking with the Pixhawk flight controller from 3D Robotics in the US as it's a tried and tested board and one we're very familiar with from our other testing. There was a little bit of additional set up required using the built in v-tail mixer for the Pixhawk and with the addition of flaps but aside from this it was quite straight forward to get going. There was an issue with the compass being affected by magnets which were used to keep the wing opening closed but once these were removed we were good to go! Below is the Pixhawk being configured and tested on the wing. You can also see the v-tail attachment in this image as well as the tail servo placements. You might also notice that we've got Mission Planner loaded up on a laptop. The laptop was kindly provided by a mutual friend, Mike Davis, so we'd like to take this opportunity to give him a big thank you as well, thanks Mike! 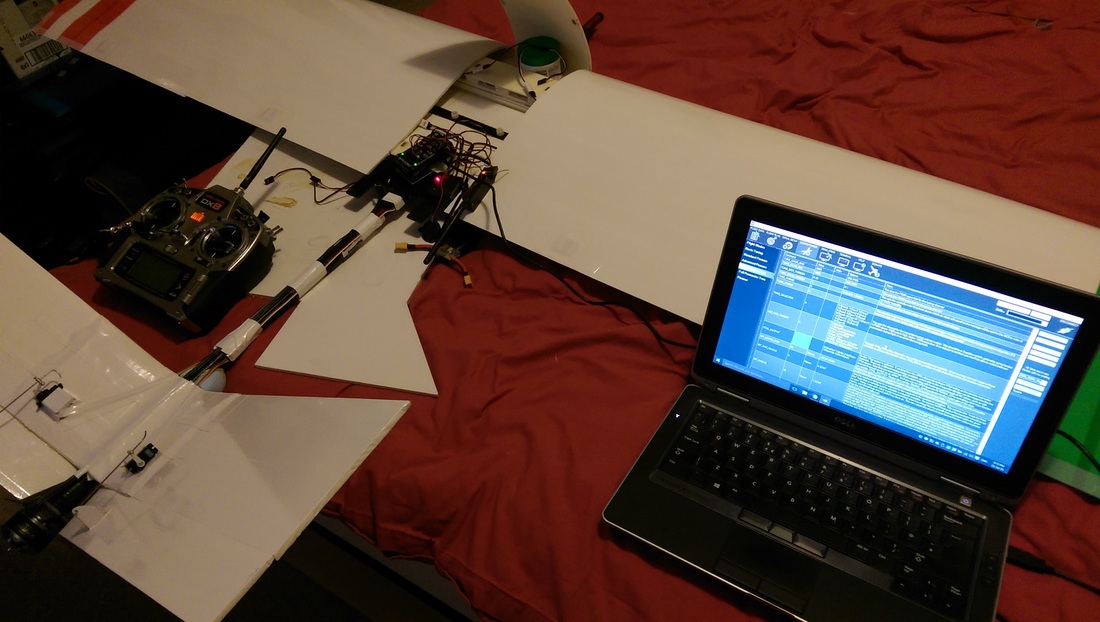 With the plane now completed all that was left to do was to test whether it actually flies! The construction of the Mk3 was done in London at Tom M's house so the first test would be whether it actually fits in Tom A's car! Happily it fitted with a few cm to spare though we still managed to crush the end of one of the ailerons in the boot lid. Fortunately it straightened out to nearly new once we had it out of the car in Oxfordshire where we do all of our flight testing. Maiden flight We really had no idea whether the plane was going to fly as although all the numbers looked ok the real test is in the field! The major concerns were over the weight (as this was much higher than anticipated) and whether the motor would be able to put out enough thrust to generate lift quickly enough in order to fly. There was also a little concern over the flexibility of the foamboard for the control surfaces as they are quite long. Here's what happened (you'll probably get a clue from the thumbnail!): It worked!!!
Tom A was doing the throwing with Tom M standing behind at the controls. As you might be able to tell from the video it had no problem in taking off and the prop was generating more than enough thrust to propel it into the air no problem. Tom A actually mentioned that it's almost a case of holding it back. The first flight was all with mid-flaps and the flaps were then tested during the second flight. The landing with full flaps was nice and slow and no damage was done to the plane. It was also noticed that elevator authority could be a little better so this will be dealt with prior to the next round of testing. In general though the flights went brilliantly and the plane was stable in the air and controllable which is exactly what we're looking for. We're really happy with the result. The additional weight of the plane is also advantageous for windy conditions which we tend to get a lot of in the UK so at least there is a benefit to this. The next step is to go through some auto-pilot testing and ensure the plane can fly autonomously and then do some surveys! As always, watch this space! We have made a lot of advances on the detector side of things so decided to re-visit the use of the quad-copter, something we had moved away from due to issues with motor noise and the weight of the detector. We suspended the Peersonic detector under the quad and flew a small route of approximately 200 meters along tree-lines surrounding a field. In the corner of the field we picked up bats. This is the first time we have picked up high quality recordings of bats using our setup!  The flight path of the quad-copter 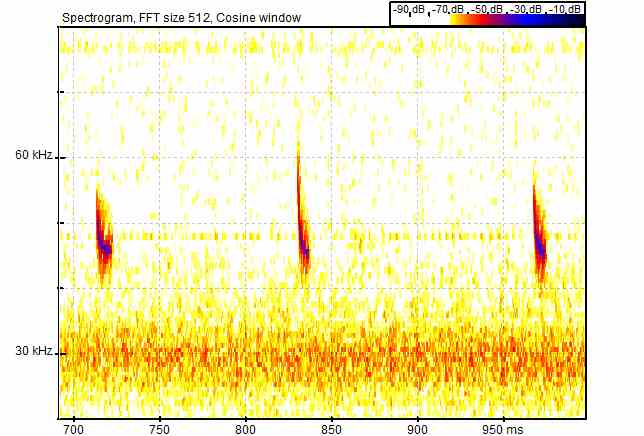 Sonogram of our first recordings Video of the flight with audio from a Bat Box Duet (held at ground level along with the camera) This is a real break though as the noise we see from the propellers is clearly significantly quieter that the calls we recorded. To reduce this further we hung the detector a little lower (initially 2m and changed to 4m) from the quad and got some even better calls from Common Pipistrelles (Pipistrellus pipistrellus). We know these are common pipistrelles because of their 'hockey stick' shape and because the peak frequency is at around 45kHz. 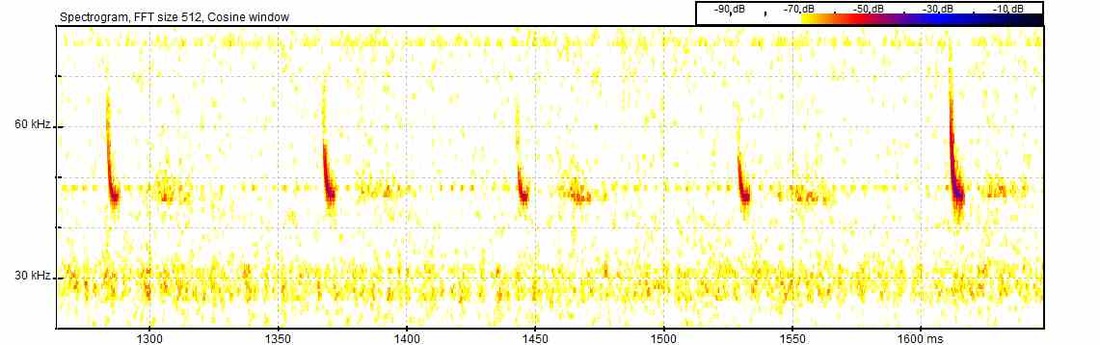 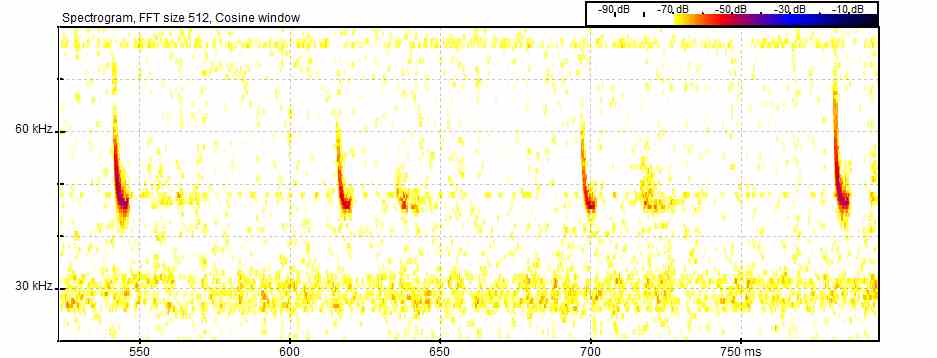 We are going to continue to explore the potential of both the quad and the fixed wing as platforms for bat detectors.
Watch this space! Way back when (in September 2014) during the initial phases of our project we were aware that flying a drone might have some legal implications so we took some care to search through the specific legislation (from the CAA, mostly Air Navigation Orders) and find out what we needed to do to stay within the law. You can check out the post here.
I (Tom A) recently gained my Permission for Aerial Work, this is the qualification you need to undertake commercial drone work in the UK. So we wanted to document the steps someone would need to take to use our bat-drone commercially in the UK, should we create a working platform. Please note that 'commercially' in this case also refers to research undertaken by universities. The following also only applies in the United Kingdom. Civil Aviation Publication (CAP) 393 is the legislation that covers drones and it stipulates that: "The person in charge of a small unmanned aircraft must not fly the aircraft for the purposes of aerial work except in accordance with a permission granted by the CAA" 'Aerial work' here means commercial work in the broad sense, including exchange of services or a crate of beer for example! The 'permission' that is mentioned is granted by the CAA after an individual has undergone training and in this way is similar to a license. To get this we must:
This is a fairly significant investment, totaling approximately £1500 but would be required before you could do any commercial activities or get insurance. A 'Permission for Aerial Work' is not required if the activity is not commercial. For example if you were just flying a bat drone around for fun you would be allowed to do so as long as you kept within the law:
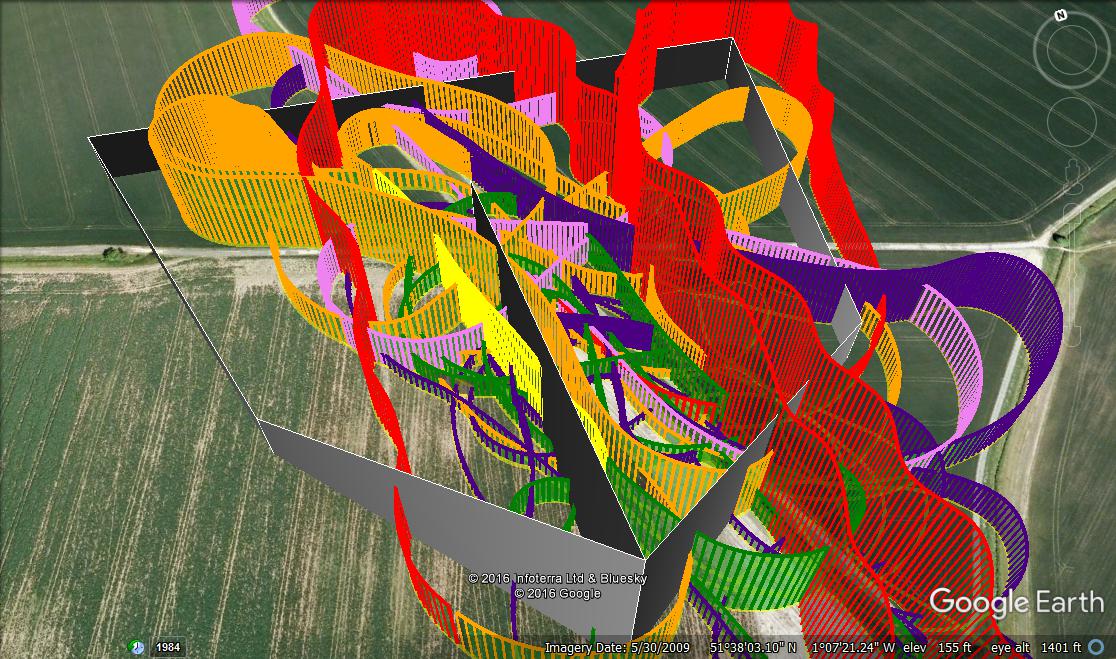
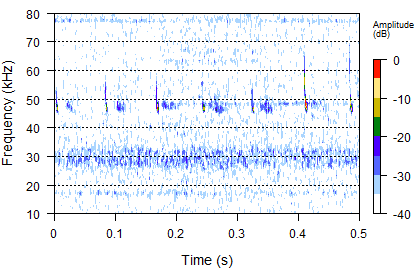
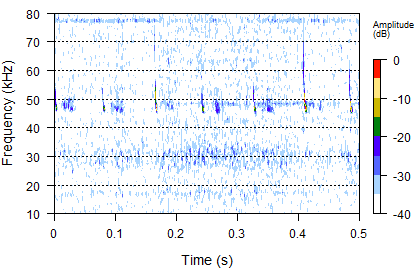
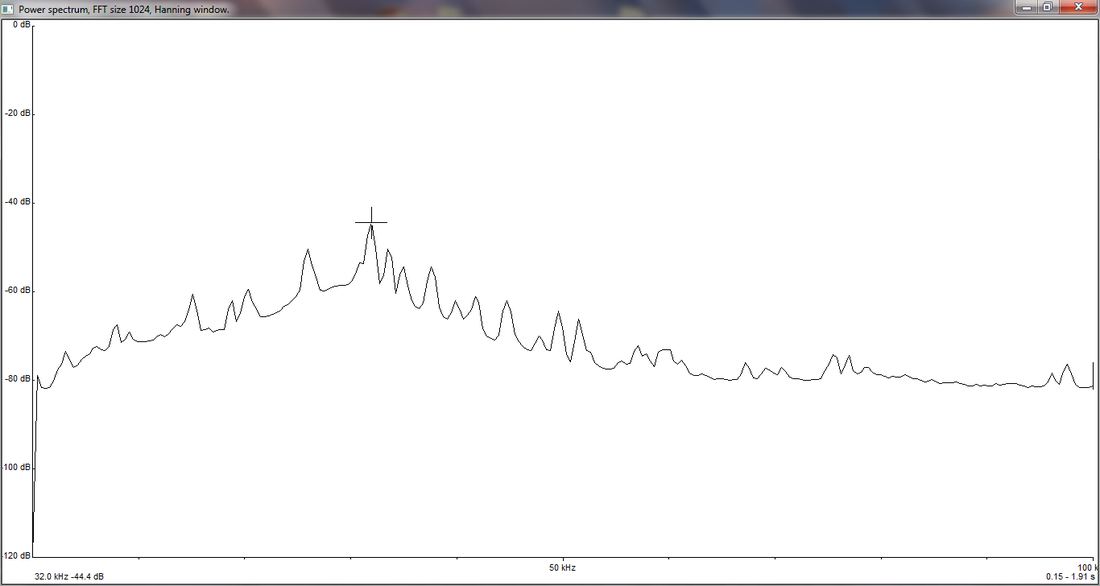
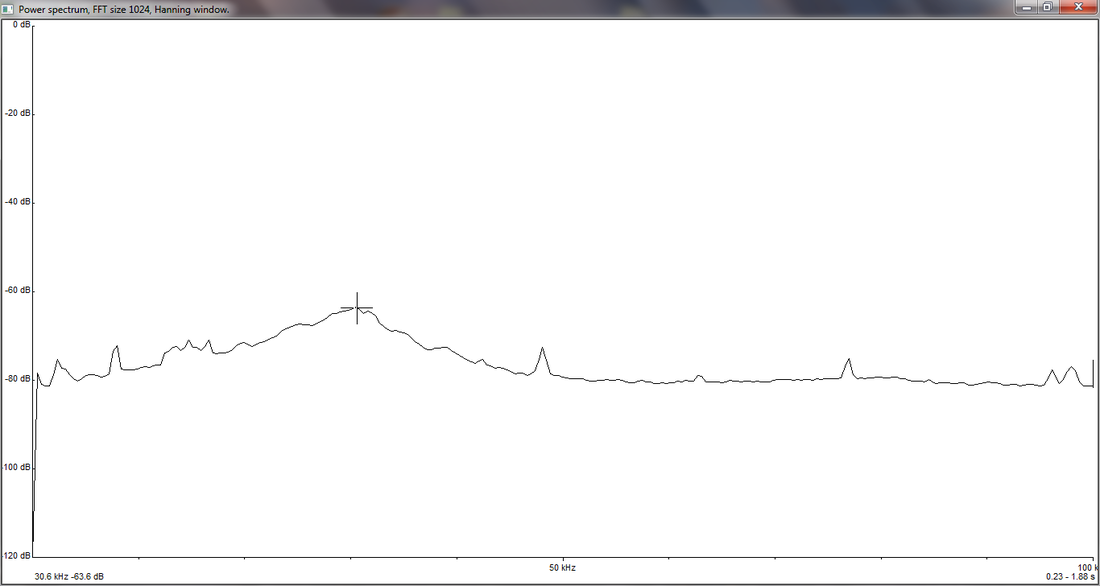
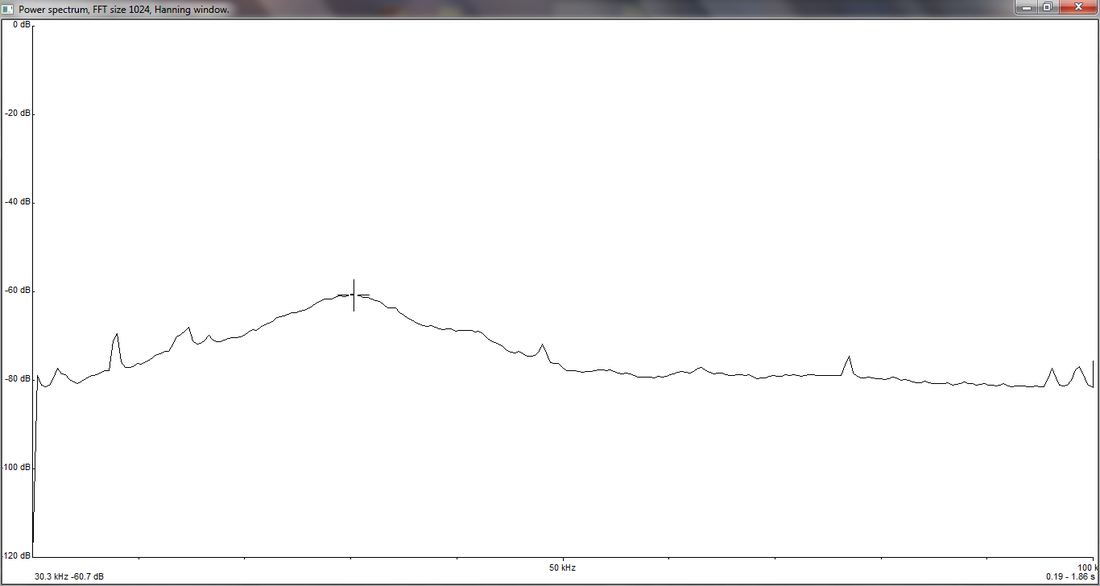
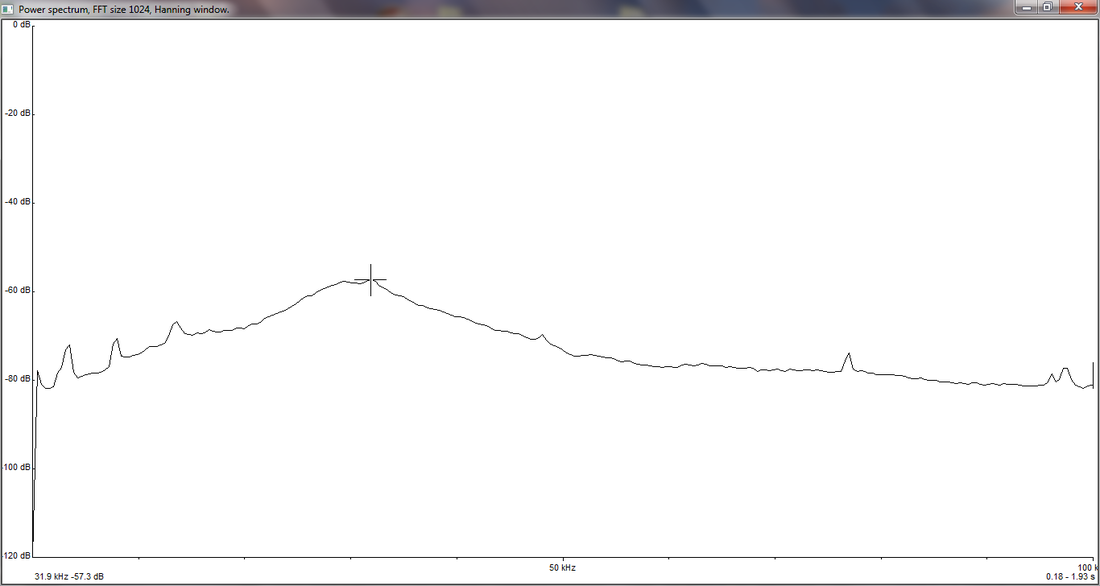
The CAA have actually released a number of simple steps called the 'Dronecode' which give you a handy reference for what you should and shouldn't be doing with your drone. You can check it out here: https://www.caa.co.uk/Consumers/Model-aircraft-and-drones/The-Dronecode/ If you did want to use a bat drone commercially and did not want to get the qualification yourself then the alternative is to hire someone else to do it for you. If you managed to read our first post about the Batboat (here) then you'll know that we had a couple of issues with its performance. This was mainly that at low speeds, the maneuverability was poor. The idea we had to fix this is to add a much larger rudder to the boat to increase the surface area and provide a larger moment on the boat allowing it to turn faster. Here's what we came up with:  New rudder side view  New rudder end view The new rudder has approximately four times the surface area of the old rudder and has managed to cut our turning radius at low speeds in half. It's made out of brass which is very corrosion resistant. We picked up the brass from a hardware shop and it wasn't too difficult to find and to work with. To attach the plate to the rudder we drilled a couple of holes in the rudder and the plate and put two bolts through which are secured with nuts. One consideration with the larger rudder is that we now don't want to travel as fast and make a large turn as this will put a lot more force on the rudder control servo and we don't want to strip the gears (within the servo). As part of this we've limited the throttle input to 50%. Another new addition to the Batboat is a Pixhawk flight controller with the rover firmware installed for ground based vehicles. Have a look here for the rover documentation. We've found a little space on the underside of the lid to put it on:  Pixhawk 'flight controller' 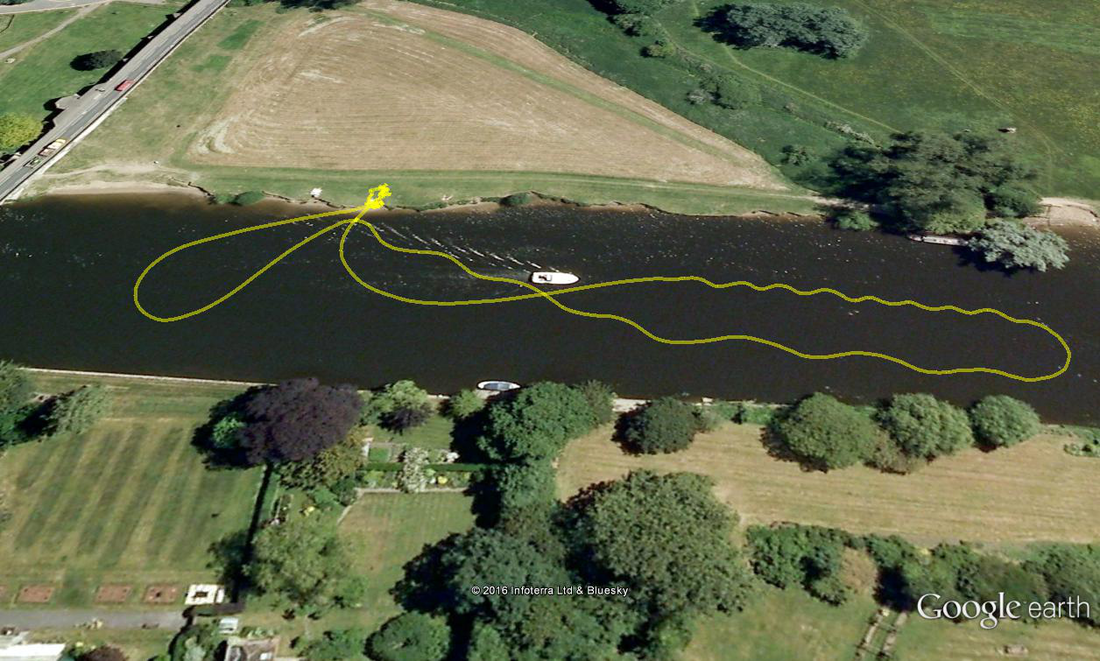 Batboat first autonomous run Just like the plane and quadcopter, the Pixhawk allows us to program in pre-set waypoints for the boat and for it to navigate to these waypoints autonomously. We managed a little test of this system up and down the river in a loop of about 150m which the boat navigated well though the PID settings require tuning (check out the weaving that we currently have on the image above). Unfortunately we don't have a video of the boat following the waypoints but we did have some fun after and do some drive-bys and soak ourselves so here's a video of that instead! Next step for the Batboat will be tuning the controller and some real world testing to record some bats! Stay tuned to see how we get on! The last time we flew the plane we pretty much smashed up everything but there was just enough left to test a new set of propellers that we got. There's no photo of the DJI q-tip prop unfortunately but if you imagine the DJI prop with about 5mm of the tips turned 90 degrees into the flow of the air then this is what it looks like! We tested each propeller for the amount of ultrasound that it gave off and here are the results. The axis along the bottom is the frequency and up the side is the volume, so we want the blade with the lowest peak.
Top left - clockwise: 3 blade, DJI normal, DJI with q-tip, Graupner eprop, below: Graupner slow fly 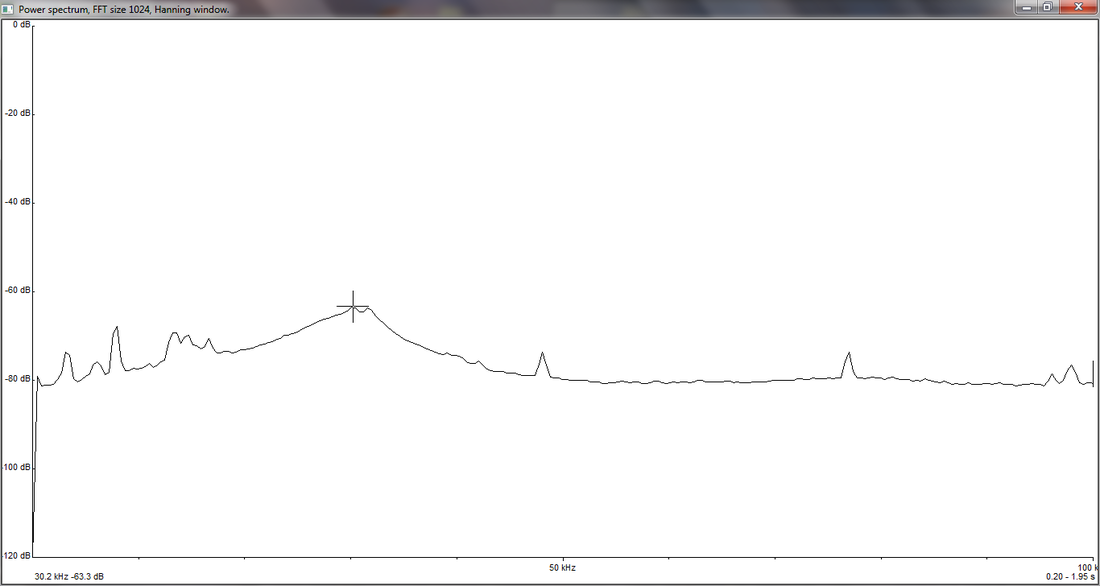 The Graupner slow fly propeller, above, (which is wider than the other propellers) was much quieter than the other props. In fact, since the volume is measured on a log scale (decibels) this propeller was 10 times quieter than the loudest prop - the three-bladed propeller.
This test demonstrates that the propeller in use does have a significant affect on the amount of ultrasound produced and that is is possible to reduce the ultrasound interference from this source. |
Categories
All
Archives
March 2017
|







 RSS Feed
RSS Feed
