|
Following on from our post here about our new detector from PeerSonic we went ahead and did some testing with this on the plane. We wanted to ascertain how the plane/detector performed for two criteria:
For a quick reminder, here's the set up we were using as modelled by Tom A:  Wing mounted detector set up The position of the detector on the wing tip is not ideal. It leaves the detector open to damage upon landings and adds additional weight at an extreme position relative to the centre of gravity which must be counterbalanced and gives rise to instability. For flight testing, we balanced the weight of the detector with a bag of sugar on the opposite wing. We're currently working with Peter at PeerSonic for a solution to this where we'll hopefully have the microphone separate from the detector and be able to mount the detector more centrally (relative to the centre of gravity for the plane). So, how did it fly? There was a noticeable instability in the roll element of the flight but nothing that the flight controller stabilisation and pilot input couldn't correct. This was more apparent when windy but the plane was definitely flyable in this configuration. For the ultrasound detection testing we flew two passes at roughly 10 m from the detector horizontally and at altitudes of approx 10 m and 20 m. Here are the sonograms from these passes: 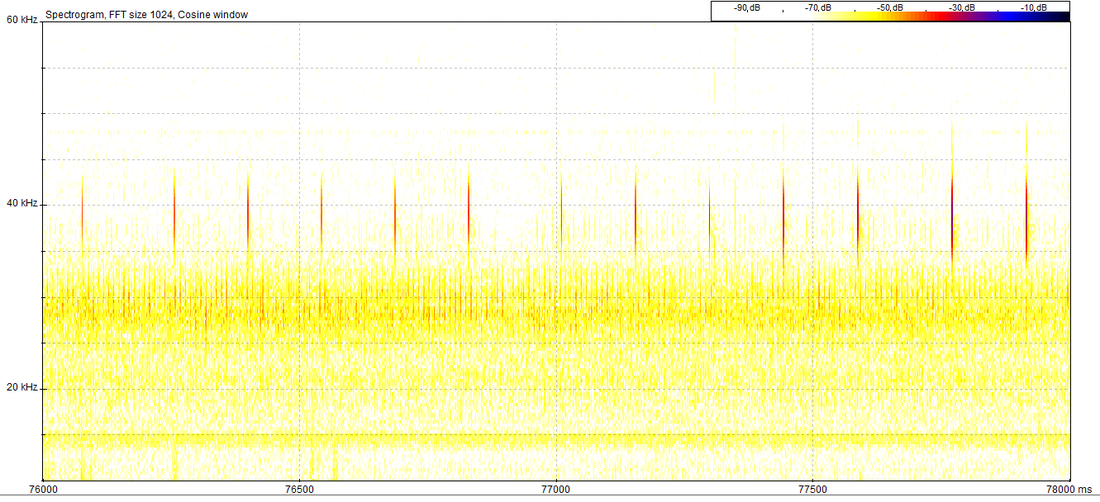 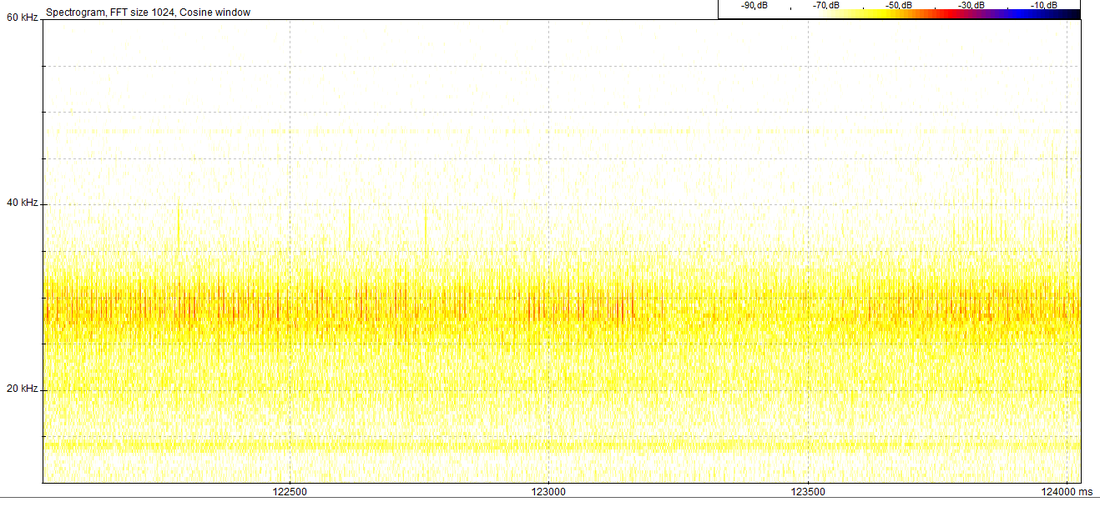 The ultrasound source is easily visible at 10 m, especially as it's a different frequency to the propeller interference. At 20 m we can see that the ultrasound source is hardly detectable.
Fortunately, we expect bats to be somewhat louder than our ultrasound source and hope to be able to detect at 20 m and perhaps even further. So, great news! We now have a working prototype for the Bat UAV! In the next post, we'll be doing some actual field testing and see if we can record any bats!
0 Comments
Leave a Reply. |
Categories
All
Archives
March 2017
|
 RSS Feed
RSS Feed
