|
We spent a weekend recently assessing the Bat Quad MkII. Here's what we found out. What we're testing We've focused our initial testing on two areas.
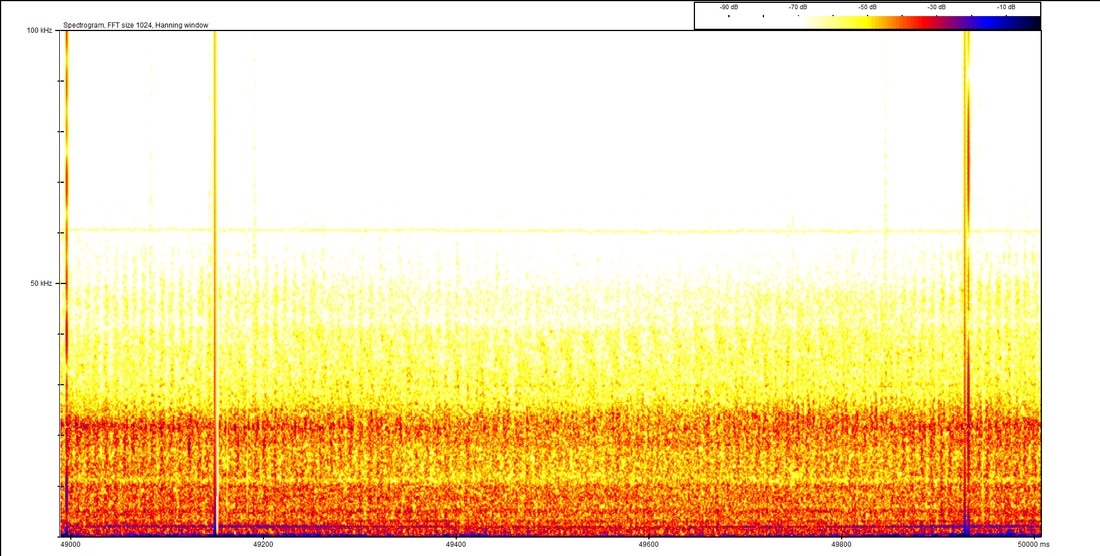
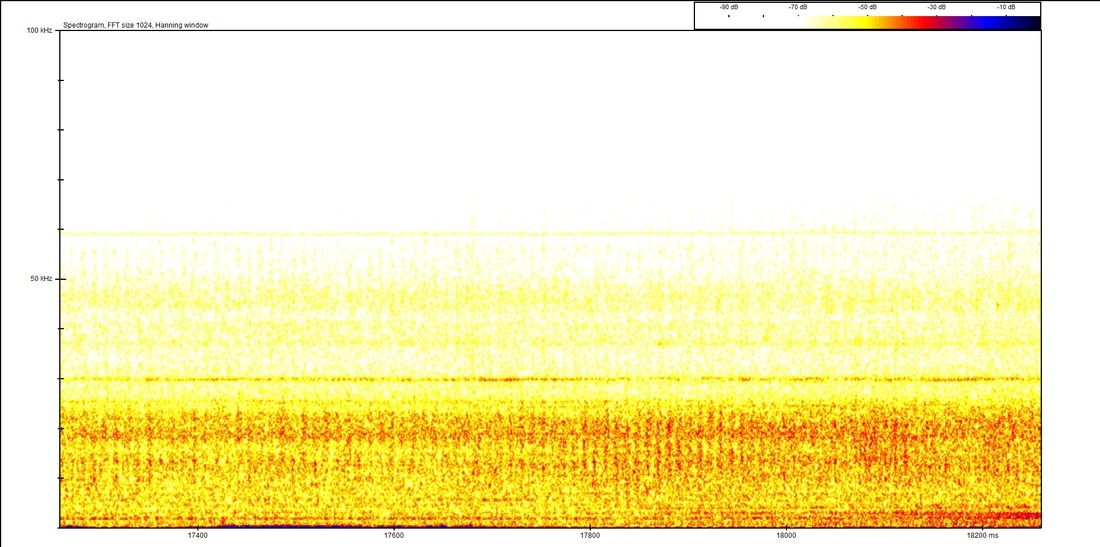
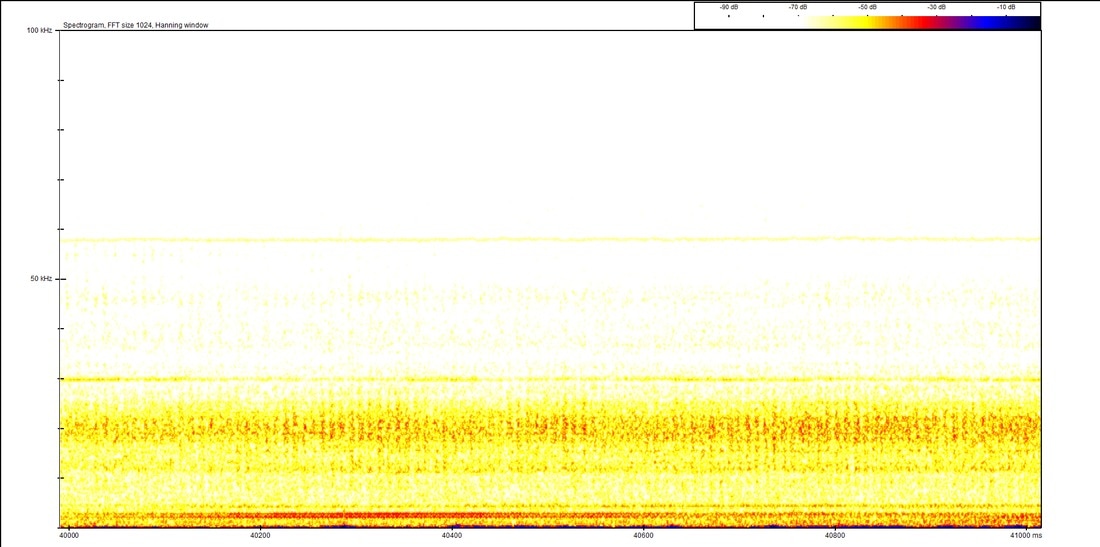
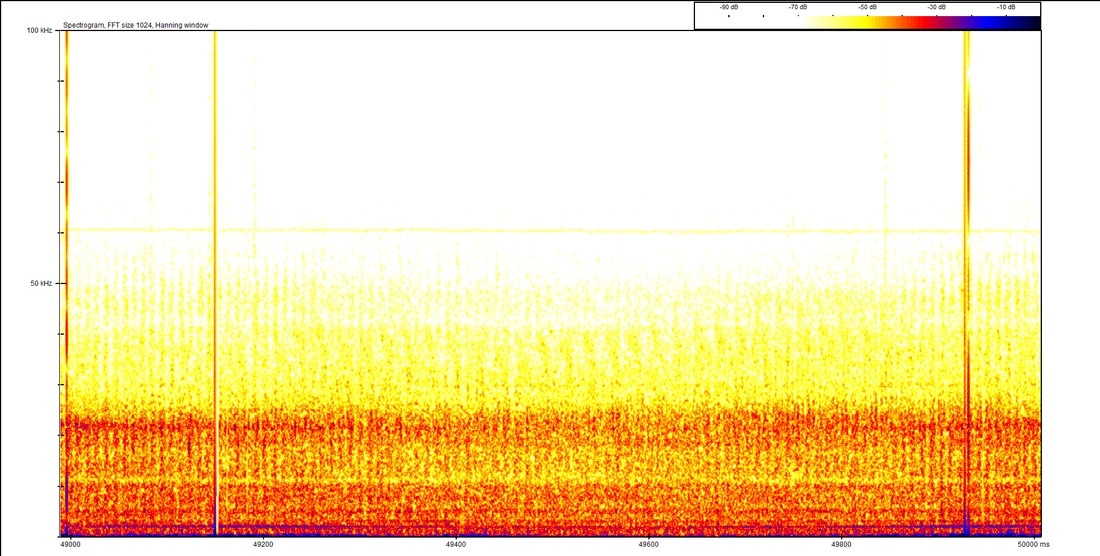
Flight testing The first point worth noting is that it does fly and works well (phew!). We use a flight controller (Pixhawk) running the ArduCopter firmware which allows us to use different flight modes for different tasks. Have a look at the documentation here if you'd like to find out more. We're happy with the stability in the air and a run through of flight modes like stabilise (standard flight mode), altitude hold (quad maintains constant altitude) and loiter (quad maintains constant position in all axes). One of the most useful features of a bat drone is that it will be able to follow a pre-determined route by itself with little or no human input (though we are able to take control at any time). We tested this ability by creating a simple three waypoint route for the quad to follow. Here's how the route looks in our Ground Control Software (GCS) Mission Planner: 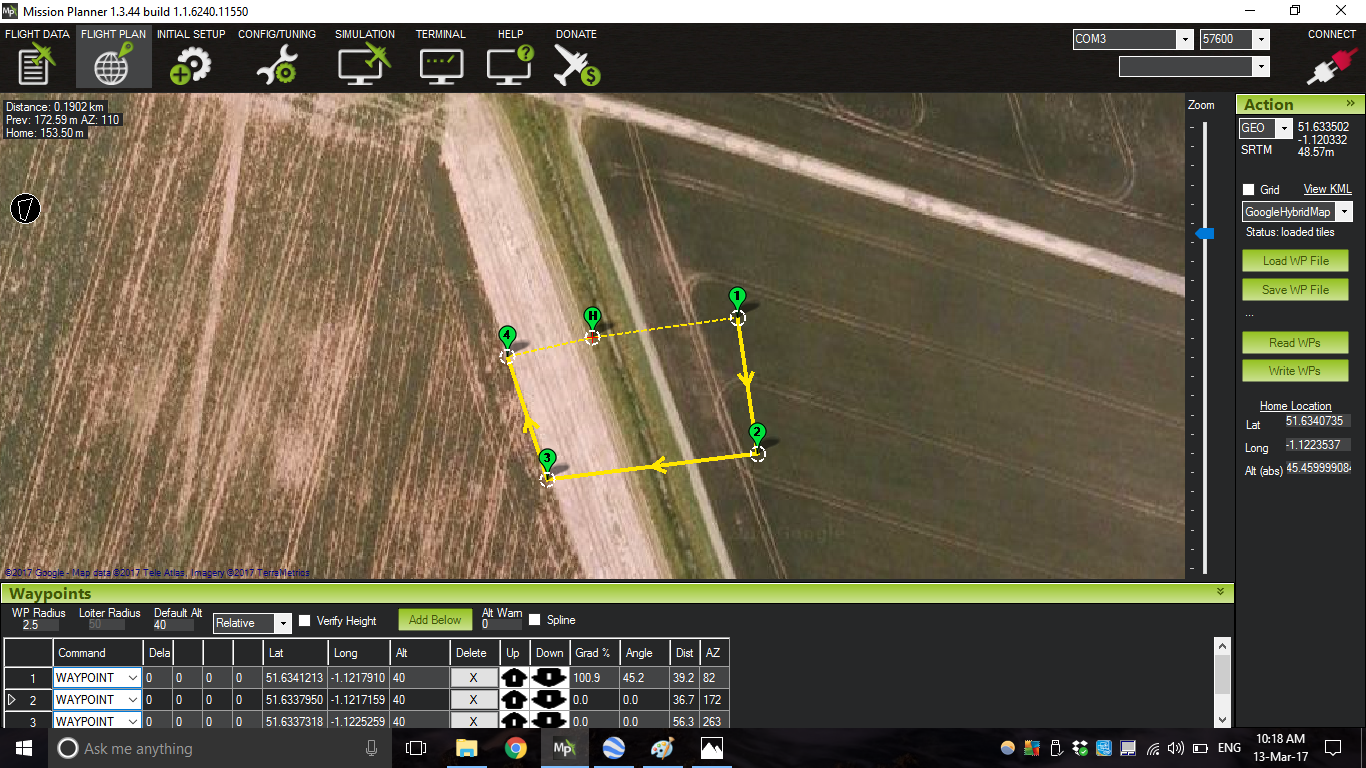 Mission Planner auto Quad MkII test route And below is the actual route the quad flew (in red), taken from the on-board telemetry data. The solid black 'wall' is the waypoint route. We're really happy with the accuracy of the following ability; especially considering our waypoints only have a 2.5m radius. 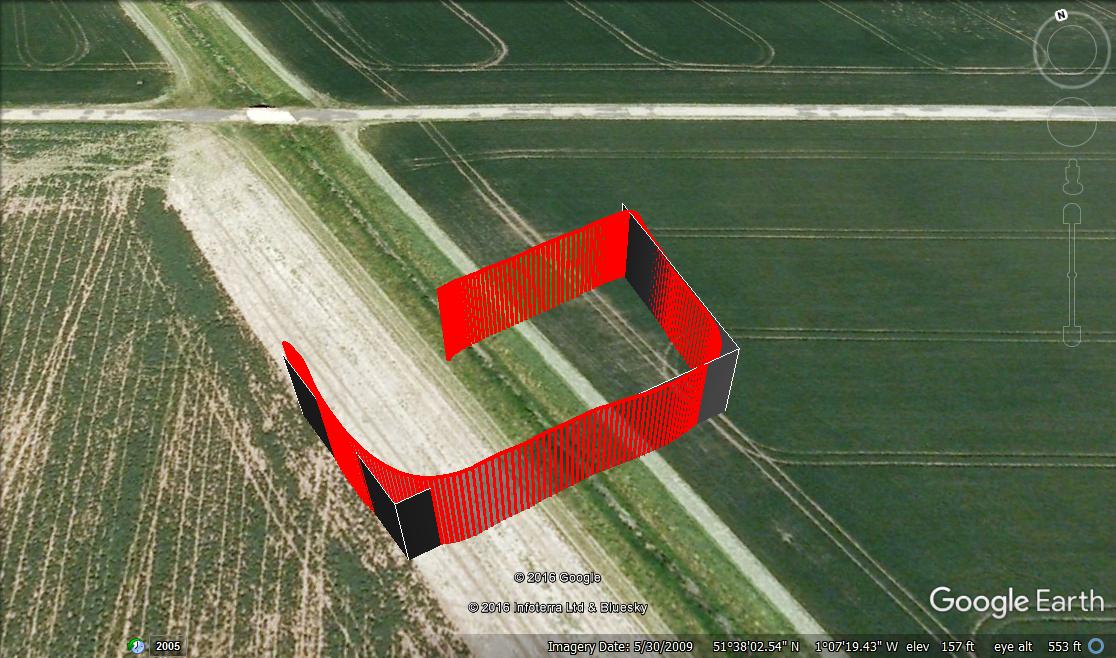 Actual data from telemetry for auto Quad MkII test route Another test of a key ability is the Return To Launch (RTL) feature. We can use this if we experience any issues and want to bring the quad back to the takeoff point. When activated the quad climbs to a height of 50m (to avoid any obstacles like trees that might be in-between it and the takeoff point) and then flies to the takeoff point and descends to land. The tracks of this test flight are shown below. The green and blue are stabilise and altitude hold tracks and the purple is the RTL track.  Quad MkII RTL test route Again, we're happy with the result here. The quad gained the required height then flew back to a position over the takeoff point and proceeded with the landing. Something we're particularly interested in is flight time. The quad needs to have a flight time that is useful when in the field monitoring bats. Obviously, the longer the better but with the current limitations of the technology we would be happy with 30 minutes on a standard battery. We feel that this would provide a decent amount of time in the air and we can quickly change batteries when on the ground to get another 30 minutes of flight available. Alternatively, it would be possible to use a larger or more energy dense battery to have a flight time of 1 hour if this is required. If you managed to see the last blog post about the Quad MkII then you might remember that we ran through a calculation of the theoretical safe (20% battery remaining) flight time (30.1 mins). Now that we're actually flying we can put this to the test! We flew to about 15m and put the quad into loiter mode then left it there for 10 minutes. We then took the battery, which was fully charged before the flight, and charged it again, taking note of the mAh put into it. This came to 1082 mAh; the total battery capacity of 4000 mAh so working this through we calculate the safe flight time to be 29.6 mins. The quad is actually a little heavier than we thought it would be (1477g vs the theoretical 1417g) so given this we're really happy with the result. The time is so close to 30 minutes that we have no qualms about pushing the flight time to this. Very pleased that we've hit our numbers with this as it was a key reason to design and build a bespoke quad. FLIGHT TESTING - PASSED! Acoustic testing It's no good if you can't hear the bats over the noise of the drone! We know from previous experience that the detector must be separated from the source of interference (the propellers). We've run through some tests with both the Peersonic and AudioMoth detectors to see how they perform and what noise they pick up at different distances from the quad. This will then set the distance the detector will be separated from the quad by. Have a look at our recordings from the two detectors at different distances from the quad below:
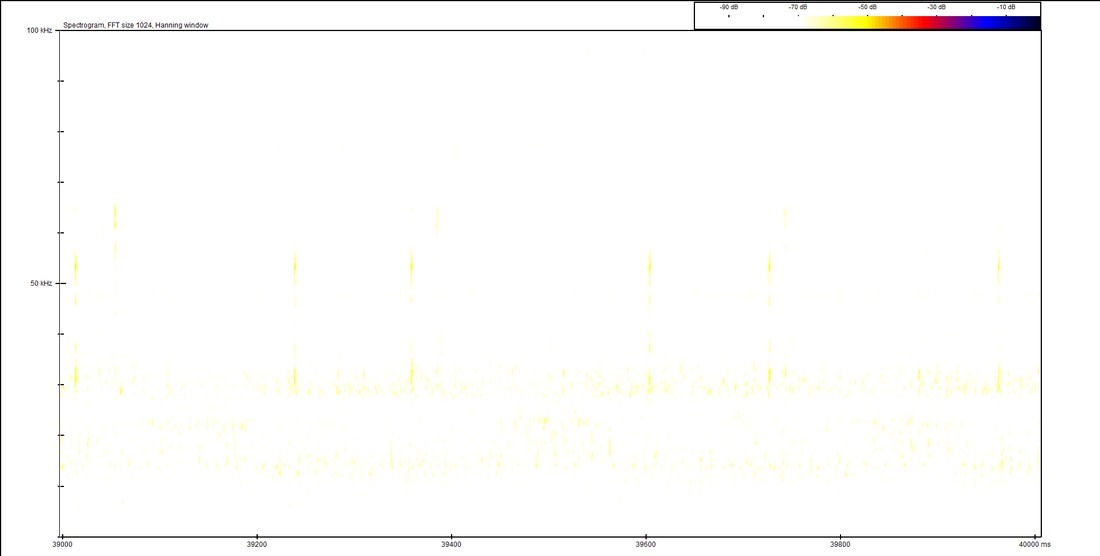
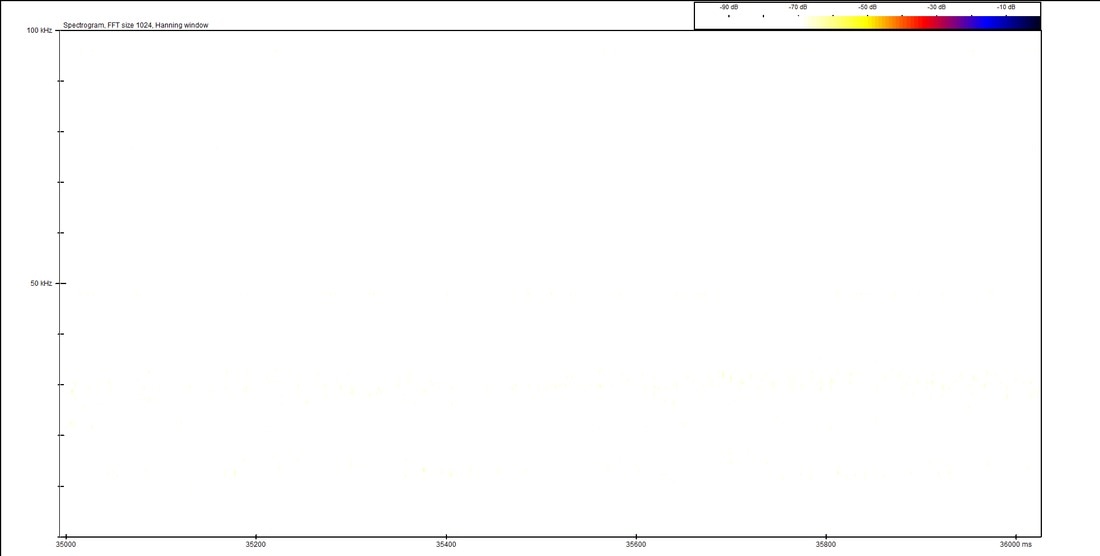
The AudioMoth is more sensitive in the lower frequencies than the Peersonic as we have worked with Peersonic to get a microphone that discriminates against the interference noise. The results show that at 3m the Peersonic has very little noise. To explore this further we flew the Peersonic at a 3m distance and at an altitude of 20m. We then used the ultrasound emitter to create simulated bat calls. 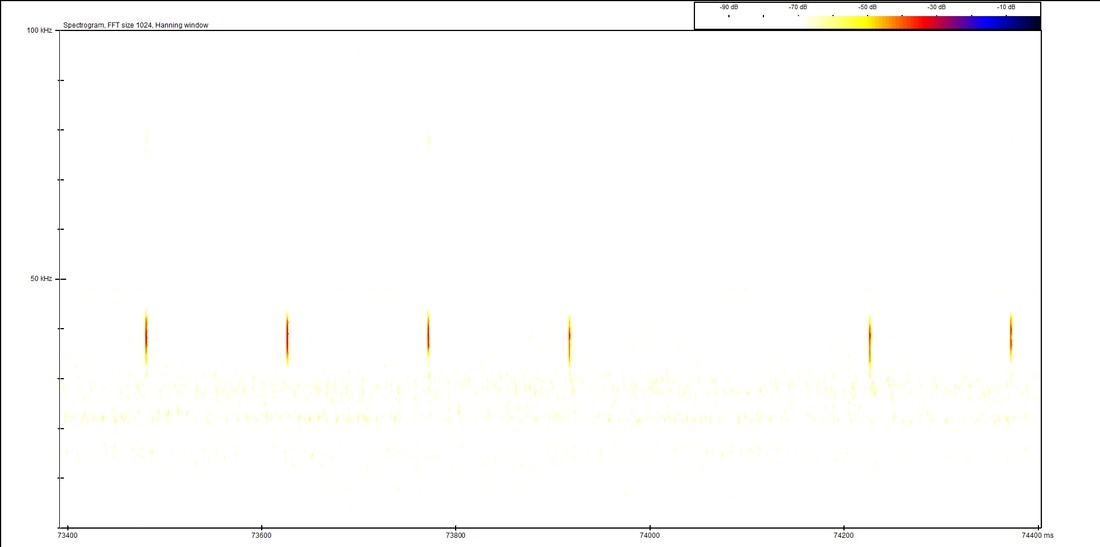 This is very promising, and indicates we have very good opportunities to record bats.
Watch this space for field testing of the new quad!
0 Comments
Leave a Reply. |
Categories
All
Archives
March 2017
|
 RSS Feed
RSS Feed
